
 Available
Available
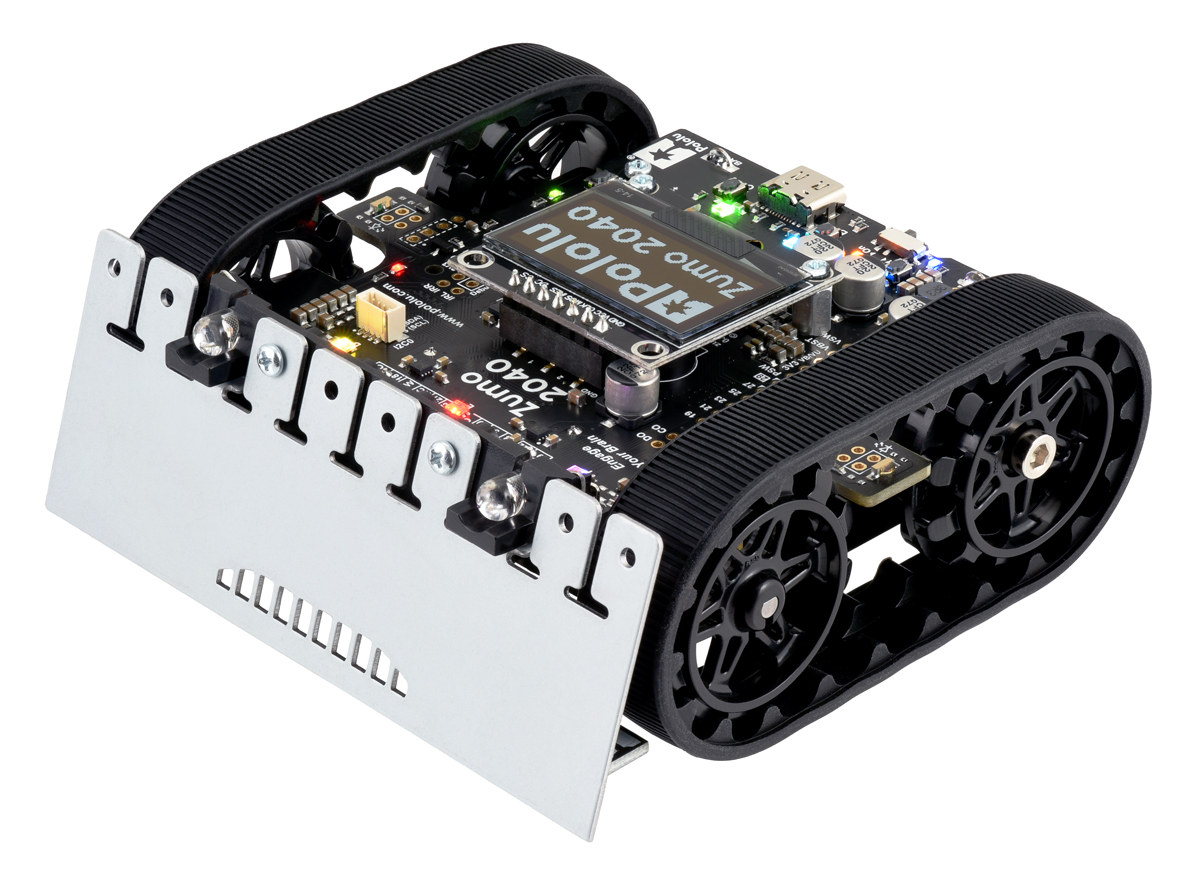
The Pololu Zumo 2040 Robot assembled with 75:1 HP motors is an advanced educational robotics platform designed for algorithm development, robotics competitions and STEM learning. Powered by the versatile Raspberry Pi RP2040 microcontroller, this compact tracked robot combines high processing performance with a comprehensive range of integrated sensors and actuators.
This version features two 75:1 HP metal gearmotors, providing an excellent balance between speed and torque. Its drivetrain configuration makes it particularly suitable for applications requiring agile movement, dynamic navigation and Mini Sumo robot competitions. With dimensions below 10 x 10 cm, it complies with the standard requirements of this competition class.
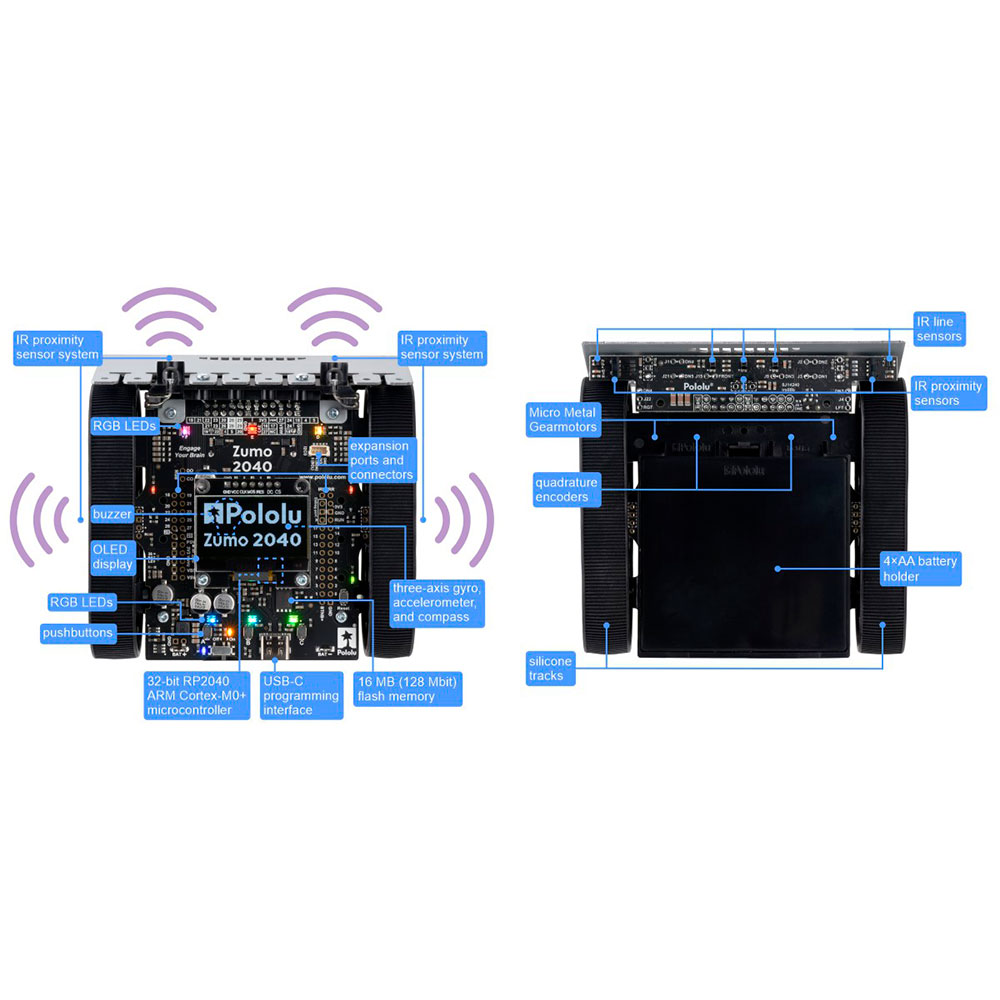
The robot incorporates quadrature encoders for precise speed and position control, infrared proximity sensors for obstacle detection, reflective sensors for line-following applications and a complete inertial measurement unit (IMU) featuring an accelerometer, gyroscope and magnetometer.
The dual-core RP2040 processor operates at 125 MHz and supports programming in Python, MicroPython, Arduino, C and C++. Its 16 MB Flash memory provides ample storage for advanced robotics projects, autonomous navigation systems and embedded applications.
Additional features include a 128 x 64 graphical OLED display, six programmable RGB LEDs and an integrated buzzer. Supplied fully assembled, the robot requires no soldering or mechanical assembly. Simply install four AA batteries and connect a USB-C cable to begin programming.
It is an excellent choice for anyone looking for a Raspberry Pi RP2040 educational robot, a mobile robotics platform with integrated sensors or a high-speed programmable Mini Sumo robot.
| Manufacturer | Pololu |
| Model | Zumo 2040 Robot (Assembled with 75:1 HP Motors) |
| Part Number | 5012 |
| Microcontroller | Raspberry Pi RP2040 |
| CPU Architecture | Dual-Core Arm Cortex-M0+ |
| Clock Speed | 125 MHz |
| RAM | 264 KB |
| Flash Memory | 16 MB |
| Programming Languages | Python, MicroPython, Arduino, C and C++ |
| Included Motors | 2 × HP Micro Metal Gearmotors 75:1 with Extended Shaft |
| Gear Ratio | 75:1 |
| No-Load Speed (6 V) | 400 RPM |
| Stall Torque (6 V) | 22 oz·in |
| Stall Current (6 V) | 1600 mA |
| Maximum Robot Speed (500 g, 6 V) | 65 cm/s |
| Motor Drivers | Integrated Dual H-Bridge |
| Encoders | 2 Integrated Quadrature Encoders |
| Line Sensors | 5 Bottom Reflectance Sensors |
| Proximity Sensors | Front and Side Infrared Sensors |
| IMU | 3-Axis Accelerometer, Gyroscope and Magnetometer |
| Display | 128 × 64 Graphical OLED |
| RGB LEDs | 6 Programmable RGB LEDs |
| USB Interface | USB Type-C |
| Power Supply | 4 × AA Batteries |
| Dimensions | 96 × 99 × 39 mm |
| Weight | 160 g (Without Batteries) |
| Assembly | Fully Assembled |
| External Programmer Required | No |
| PCB Code | zum03a |



