Available
Available
The SparkFun VR IMU Breakout provides access to virtual reality and orientation tracking technology without the need for significant investment. At its core is CEVA’s BNO086, an advanced IMU sensor that integrates a triple-axis accelerometer, gyroscope, and magnetometer within a compact System in Package (SiP) featuring a 32-bit ARM Cortex-M0+ microcontroller.
The BNO086 Inertial Measurement Unit delivers highly accurate rotation vectors, making it ideal for VR applications and heading reference systems, with a static rotation error of 2 degrees or less. All sensor data is processed internally using sensor fusion and drift correction, providing reliable and meaningful orientation data for projects requiring motion sensing or spatial orientation.
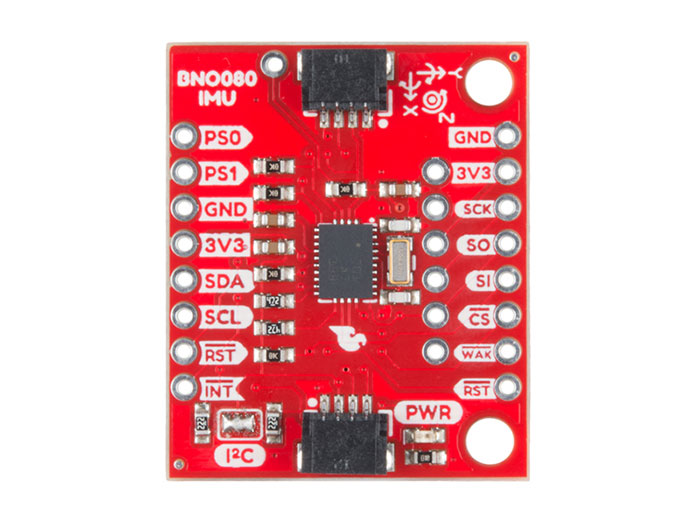
This breakout board is equipped with two I2C Qwiic connectors, allowing seamless, solder-free integration within the SparkFun Qwiic ecosystem. Standard 2.54 mm pitch pins are also provided, enabling use with a breadboard or custom hardware designs.
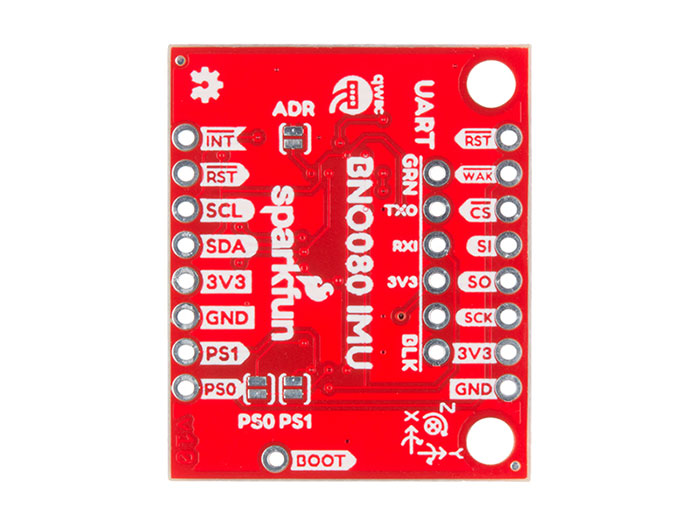
The BNO086 is the direct replacement for the BNO080 (EOL), originally designed for Android smartphones used in virtual reality headsets. It introduces enhanced features such as 14-bit accelerometer fusion, reduced idle power consumption, and interactive calibration. Configuration jumpers on the board allow selection between two I2C addresses.
In addition to I2C, the sensor supports SPI and UART communication. The official I2C-based library provides access to rotation vectors, acceleration, angular velocity, magnetic field data, step counting, and activity classification, making it ideal for real-time motion tracking applications.
| Operating voltage | 2.4 V – 3.6 V |
| Typical voltage | Typically 3.3 V via Qwiic cable |
| Communications | |
| I2C (default) | Up to 400 kHz |
| SPI | Up to 3 MHz |
| UART | 3 Mbps |
| Rotation vector | |
| Dynamic error | 3.5° |
| Static error | 2.0° |
| Gaming rotation vector | |
| Dynamic error | 2.5° |
| Static error | 1.5° |
| Dynamic heading drift | 0.5° / min |
| Geomagnetic rotation vector | |
| Dynamic rotation error | 4.5° |
| Static rotation error | 3.0° |
| Gravity angle error | 1.5° |
| Linear acceleration accuracy | 0.35 m/s2 |
| Accelerometer accuracy | 0.3 m/s2 |
| Gyroscope accuracy | 3.1° / s |
| Magnetometer accuracy | 1.4 µT |
| Qwiic connection ports | 2x |
| I2C address | 0x4B (default), 0x4A |
| I2C pull-up resistors | 2.2 kΩ |
| Power LED | Yes |
| Jumpers | |
| Power LED | |
| I2C pull-up resistors | |
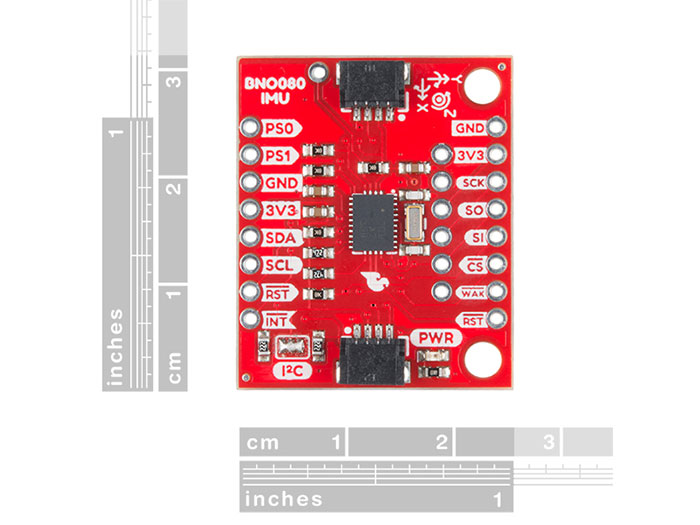
| Board dimensions | 1.0 in × 1.2 in (25.4 mm × 30.48 mm) |
| Weight | 3 g |