Available
Available
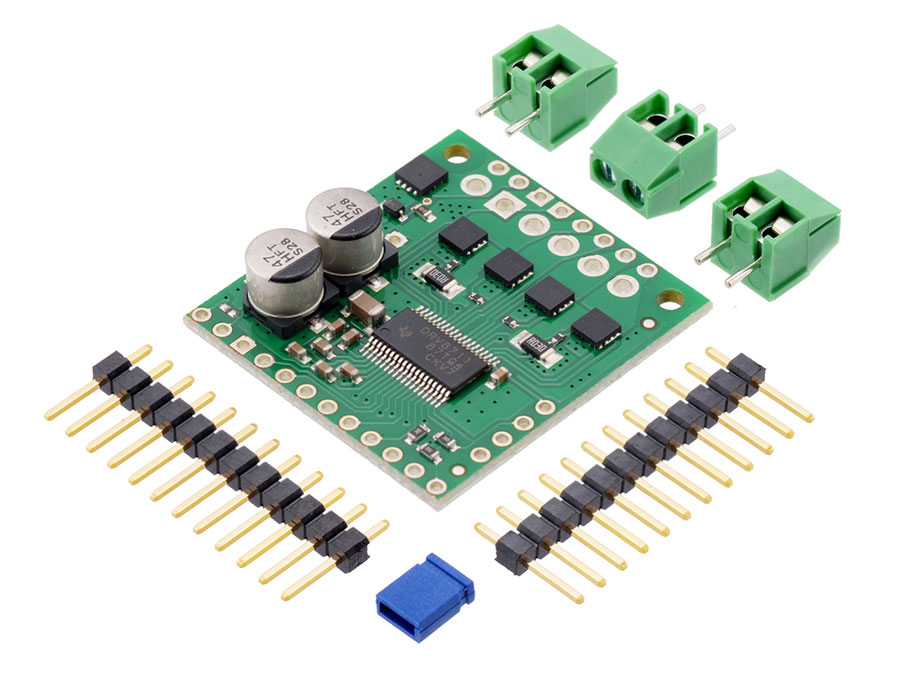
This discrete MOSFET stepper motor driver enables control of one bipolar stepper motor. It supports a wide 8 V to 50 V operating voltage range and can deliver up to 4 A continuous per phase without a heat sink or forced air flow (6 A max with sufficient additional cooling). The SPI interface allows configuration of the current limiting, step mode (9 step modes from full-step through 1/256-step), decay mode, and stall detection.
The driver also provides back-EMF feedback that can be used for more advanced control and stall detection algorithms. Additional features include reverse-voltage, under-voltage, and over-current protection.
The Pololu High-Power Stepper Motor Driver 36v4 combines the DRV8711 stepper motor driver IC from Texas Instruments with external MOSFETs to enable control of large bipolar stepper motors at operating voltages from 8 V to 50 V. The DRV8711 has many configurable settings, so please see the DRV8711 datasheet for a detailed explanation of its features and how to use them (we also have an Arduino library that simplifies getting started by providing basic functions for configuring and operating the driver).
The driver’s power performance is a function of the external dual H-bridges, which allow the driver to deliver continuous currents up to 4 A per phase without any additional cooling such as heat sinks or forced air flow. (With sufficient additional cooling, the driver can support currents up to around 6 A per phase
Key features:
Wide 8 V to 50 V operating voltage range
High-power: can deliver up to 4 A continuous per phase without extra cooling (6 A max with sufficient additional cooling)
Highly configurable through SPI interface
Optional STEP/DIR control pins (stepping can also be controlled through SPI interface alone)
Nine different step resolutions down to 256 microsteps: full-step, half-step, 1/4-step, 1/8-step, 1/16-step, 1/32-step, 1/64-step, 1/128-step, and 1/256-step
Adjustable current control lets you set the maximum current output, enabling the use of voltages above your stepper motor’s rated voltage to achieve higher step rates
Adaptive blanking time, adjustable decay times, and various current decay modes enable the creation of ultra-smooth motion profiles through the SPI interface
Optional STALL output enables stall detection when microstepping
Optional BEMF output enables more advanced control and stall detection algorithms based on the back EMF of the stepper motor
Driver supports alternate operating mode for controlling two brushed DC motors with PWM inputs instead of one bipolar stepper motor with STEP/DIR inputs
Inputs compatible with 1.8 V, 3.3 V, and 5 V logic
Digital outputs are all open drain with pull-ups to externally supplied IOREF voltage for use with non-5V systems (IOREF can be connected to neighboring 5V OUT pin for use with 5V systems)
Under-voltage lockout, over-current protection, short circuit protection, and reverse-voltage protection (up to 40 V)
Minimum operating voltage: 8 V
Maximum operating voltage: 50 V
Continuous current per phase: 4 A2
Maximum current per phase: 6 A3
Minimum logic voltage: 1.5 V
Maximum logic voltage: 5.5 V
Microstep resolutions: full, 1/2, 1/4, 1/8, 1/16, 1/32, 1/64, 1/128, 1/256
Current limit control: SPI-programmable