
 Disponible
Disponible
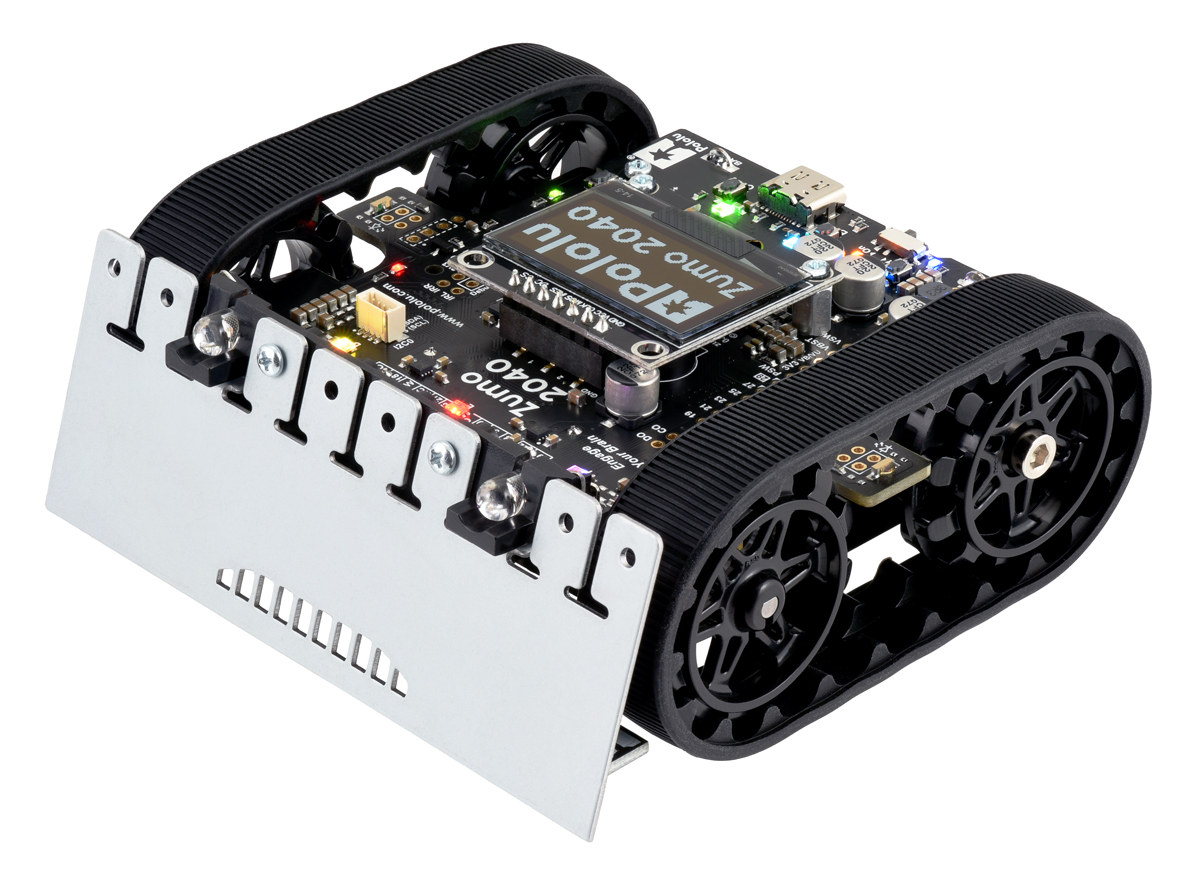
Le Pololu Zumo 2040 Robot assemblé avec des moteurs HP 100:1 est une plateforme avancée de robotique éducative, de développement d’algorithmes et de compétition, conçue pour les utilisateurs recherchant un robot programmable compact, puissant et prêt à l’emploi. Basé sur le microcontrôleur Raspberry Pi RP2040, ce robot à chenilles associe une puissance de calcul élevée à un ensemble complet de capteurs et d’actionneurs intégrés.
Cette version intègre deux micromoteurs métalliques HP avec réduction 100:1, offrant un couple élevé pour les applications nécessitant puissance, précision et contrôle avancé du mouvement. Grâce à son format inférieur à 10 x 10 cm, il répond aux exigences des compétitions Mini Sumo tout en étant parfaitement adapté aux projets de robotique mobile, d’apprentissage STEM, de navigation autonome et de suivi de ligne.
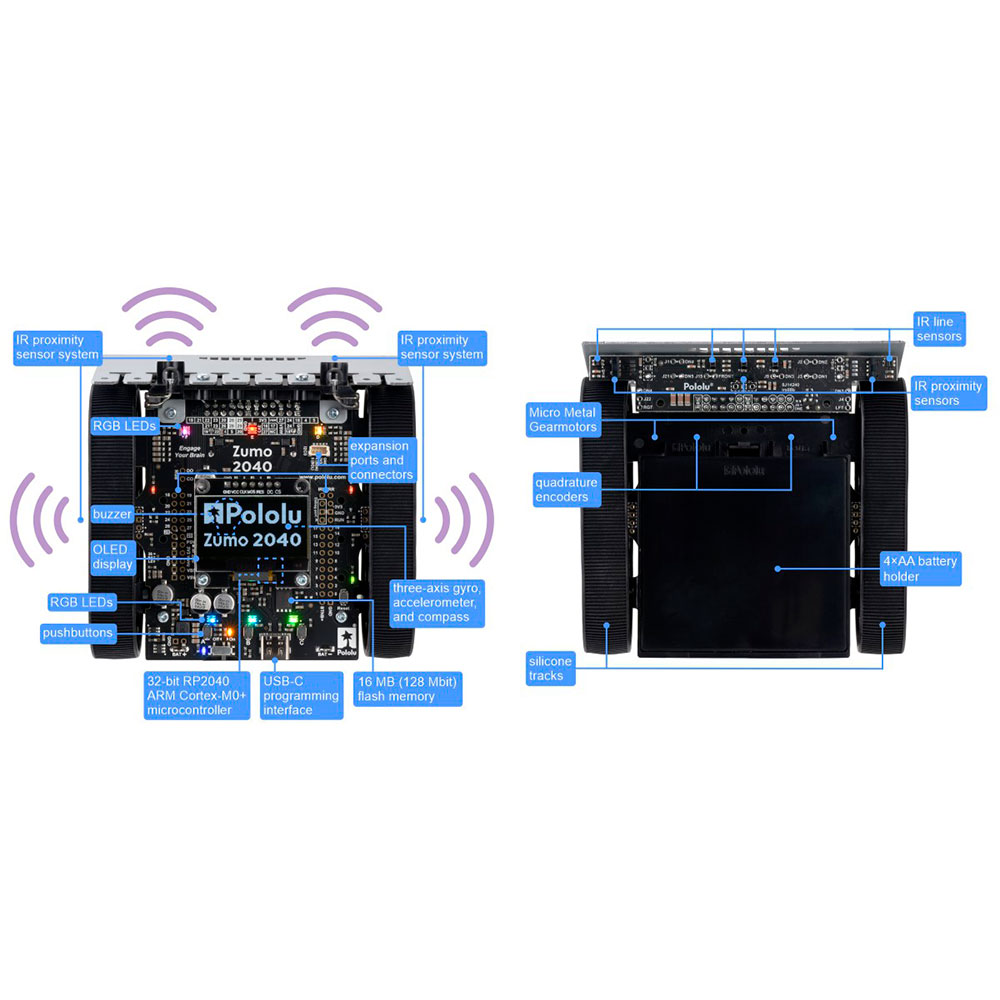
Le système comprend des encodeurs en quadrature pour le contrôle précis de la vitesse et de la position, des capteurs de proximité infrarouges pour la détection d’obstacles, des capteurs réfléchissants pour le suivi de ligne ainsi qu’une centrale inertielle (IMU) intégrant accéléromètre, gyroscope et magnétomètre.
Le processeur RP2040 double cœur fonctionne à 125 MHz et peut être programmé en Python, MicroPython, Arduino, C et C++. Sa mémoire Flash de 16 Mo permet le stockage de projets complexes et d’applications embarquées avancées.
Livré entièrement assemblé, il ne nécessite ni soudure ni montage. Il suffit d’installer quatre piles AA et de connecter un câble USB-C pour commencer à programmer. C’est une solution idéale pour ceux qui recherchent un robot éducatif programmable prêt à l’emploi, une plateforme de robotique mobile avec capteurs intégrés ou un robot Mini Sumo basé sur Raspberry Pi RP2040.
| Fabricant | Pololu |
| Modèle | Zumo 2040 Robot (Assemblé avec moteurs HP 100:1) |
| Référence | 5013 |
| Microcontrôleur | Raspberry Pi RP2040 |
| Architecture CPU | Dual-Core Arm Cortex-M0+ |
| Fréquence d'horloge | 125 MHz |
| Mémoire RAM | 264 KB |
| Mémoire Flash | 16 MB |
| Langages de programmation | Python, MicroPython, Arduino, C et C++ |
| Moteurs inclus | 2 × Micro Metal Gearmotor HP avec arbre prolongé |
| Rapport de réduction | 100:1 |
| Vitesse à vide (6 V) | 320 RPM |
| Couple de blocage (6 V) | 30 oz·in |
| Courant de blocage (6 V) | 1600 mA |
| Vitesse maximale du robot | 50 cm/s |
| Pilotes moteur | Double pont en H intégré |
| Encodeurs | 2 encodeurs en quadrature intégrés |
| Capteurs de suivi de ligne | 5 capteurs réfléchissants inférieurs |
| Capteurs de proximité | Infrarouges avant et latéraux |
| IMU | Accéléromètre, gyroscope et magnétomètre 3 axes |
| Écran | OLED graphique 128 × 64 pixels |
| LED RGB | 6 LED RGB programmables |
| Interface USB | USB Type-C |
| Alimentation | 4 piles AA |
| Dimensions | 96 × 99 × 39 mm |
| Poids | 160 g (sans piles) |
| Assemblage | Entièrement assemblé |
| Programmateur externe requis | Non |



