¿Qué es un motor paso a paso o stepper motor?
Es un tipo de motor eléctrico que se utiliza para convertir pulsos eléctricos en movimientos discretos y precisos. Se llama "paso a paso" porque avanza una cierta cantidad de pasos individuales en respuesta a cada pulso eléctrico que recibe. Estos propulsores son ampliamente utilizados en aplicaciones que requieren posicionamiento preciso, como impresoras 3D, máquinas CNC, robots, cámaras, y otros sistemas de control de movimiento.
Su funcionamiento básico se basa en la interacción entre un rotor (generalmente una serie de imanes permanentes) y un conjunto de bobinas electromagnéticas dispuestas alrededor del rotor.
¿Cómo funciona un motor paso a paso?
Un propulsor paso a paso es un dispositivo electromecánico que convierte pulsos eléctricos en movimientos mecánicos discretos y precisos. A continuación, se describen los componentes y el funcionamiento detallado:
Componentes básicos
- Estator: Es la parte fija del motor y consta de un conjunto de bobinas electromagnéticas dispuestas alrededor del rotor. Estas bobinas son la clave para generar el movimiento del motor.
- Rotor: Es la parte móvil del motor y generalmente consiste en un imán permanente o un conjunto de imanes permanentes. Está ubicado en el centro del estator y puede girar en pasos discretos.
- Eje de salida: Es la parte del rotor que se utiliza para conectar el motor a la carga que se desea mover o posicionar. A través del giro del rotor, el eje de salida realiza el trabajo mecánico deseado.
Principio de funcionamiento
- Secuencia de bobinas: Para mover el rotor se debe activar secuencialmente un conjunto específico de bobinas electromagnéticas en el estator. Estas bobinas se dividen en grupos y se pueden conectar de diferentes maneras, dependiendo del tipo de motor paso a paso (unipolar o bipolar).
- Pulsos eléctricos: Se envían pulsos eléctricos a través de las bobinas del estator. Cada pulso eléctrico activa una bobina o grupo de bobinas específicas durante un corto período de tiempo. La dirección y la cantidad de movimiento dependen de la secuencia de activación de las bobinas y de cómo se polarizan.
- Movimiento por pasos: Con cada pulso eléctrico, el rotor avanza un paso en la dirección determinada por la secuencia de activación de las bobinas. Cada paso representa un ángulo predefinido, típicamente de 1.8 grados para motores de 200 pasos por revolución. Por lo tanto, para hacer girar el rotor un círculo completo (360 grados), se requieren 200 pulsos.
- Control de posición: Se logra enviando la cantidad correcta de pulsos eléctricos en la secuencia adecuada. Al controlar el número y la dirección de los pulsos eléctricos que se envían al motor, se puede posicionar con precisión el rotor y, por lo tanto, la carga conectada al eje de salida.
En resumen, cuando se energiza una bobina, se forma un electroimán que atrae un imán en el rotor, haciéndolo girar. Al alternar entre las bobinas, se logran diferentes pasos de movimiento, incluyendo pasos completos, medios pasos y micropasos. En resumen, un stepper motor funciona mediante la atracción magnética entre el estator y el rotor, permitiendo un control preciso del movimiento.
Modos de trabajo de un motor paso a paso
Estos propulsores pueden operar en una variedad de modos, cada uno con sus propias características y aplicaciones específicas en la industria y la tecnología. Comprenderlos es fundamental para aprovechar al máximo el rendimiento y la versatilidad. A continuación, explicaremos las diferentes modalidades de trabajo y cómo se utilizan en diversas aplicaciones prácticas.
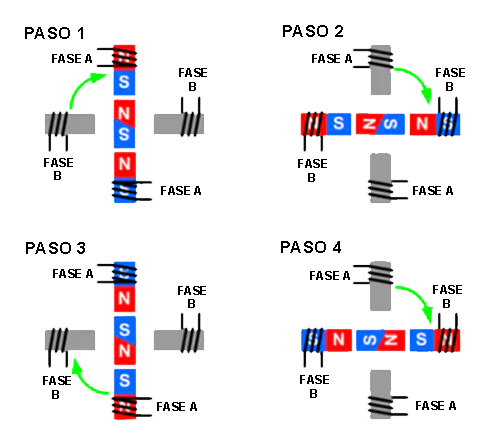
Motor paso a paso en modo de paso completo
En esta modalidad, el motor gira en ángulos predefinidos, como 1,8°, lo que significa que se necesitan 200 pasos para una rotación completa (200×1.8° = 360°). El movimiento del eje se logra al energizar una o dos bobinas. Utilizar una sola bobina requiere menos potencia del controlador, mientras que el uso de dos bobinas opuestas aumenta la potencia, velocidad y par del motor.
La figura inferior muestra el funcionamiento en modo de paso completo con una fuente de alimentación de 2 fases:
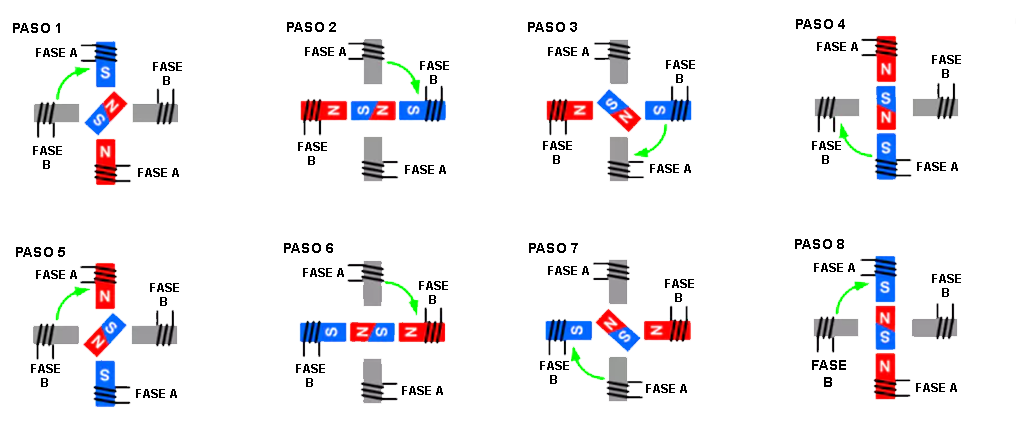
Motor paso a paso en modo de medio paso
En el modo de medio paso, la carrera del rotor se divide por 2, lo que significa que una sola carrera es de 0,9° en lugar de 1,8° (como en el ejemplo anterior). Esto resulta en 400 pasos para una revolución completa. En este modo, ambas bobinas del motor reciben energía alternamente, lo que aumenta el par en comparación con el funcionamiento en modo monofásico. Esto también hace que el propulsor funcione de manera más suave y duplica la resolución angular.
La figura inferior muestra el funcionamiento del stepper motor en medio paso con una fuente de alimentación de 2 fases:
Motor paso a paso en modo micropasos (microstep)
El paso nominal se divide en secciones más cortas que las de medio paso, con una relación de división máxima de 256. Las posiciones precisas del rotor se controlan mediante el flujo magnético generado por las bobinas alimentadas por ondas escalonadas. Este modo es ideal para aplicaciones que requieren un funcionamiento suave y una elevada precisión.
Sin embargo, al usar micropasos, es importante considerar los requisitos de velocidad de la aplicación. La reactancia inductiva de las bobinas se incrementa con la frecuencia de conmutación de la corriente en el motor, lo que puede disminuir la corriente promedio y, en consecuencia, el par del motor. Esto puede llevar a problemas como oscilaciones, detenciones del rotor o pérdida de pasos en la máquina accionada. Por lo tanto, es crucial consultar la hoja de especificaciones del motor, que debería incluir un gráfico que muestre el par en función de la frecuencia de corriente en las bobinas al utilizar micropasos.
¿Qué tipos de motores paso a paso existen?
En el mundo de la automatización y el control de movimiento, es crucial comprender los diferentes tipos de propulsores disponibles. Cada tipo tiene sus propias características y aplicaciones únicas. A continuación explicaremos detalladamente las distintas variedades y sus respectivas ventajas y desventajas.
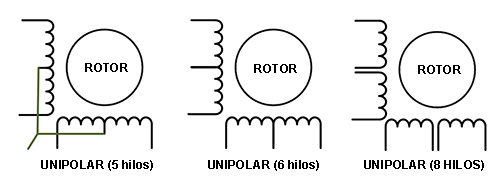
Motores paso a paso unipolares
Características principales
- Cada bobina tiene un centro de toma de corriente (punto medio) y se conecta a un transistor de conmutación. Suelen tener 5, 6 u 8 hilos de conexión de salida, según si tienen los puntos medios de las dos bobinas unidos o independientes.
- Son más sencillos de controlar en comparación con los bipolares debido a la disposición de las bobinas y la posibilidad de usar transistores unipolares.
- Generalmente, tienen menos torque y eficiencia en comparación con los motores bipolares, lo que los hace más adecuados para aplicaciones de baja carga y baja potencia.
Funcionamiento de los motores paso a paso unipolares
- Las bobinas se activan de manera secuencial en un patrón fijo para hacer que el rotor avance en pasos discretos.
- Para girar el propulsor en una dirección, se energizan las bobinas en un orden específico (generalmente, se activa una bobina a la vez). Para girarlo en la dirección opuesta, se invierte el orden de activación de las bobinas.
- Cada bobina se conecta a través de un transistor unipolar que se enciende y apaga para activar o desactivar la corriente a través de la bobina, lo que crea un campo magnético que empuja o atrae al rotor.
Ventajas de los motores paso a paso unipolares
- Facilidad de control: Son más fáciles de controlar debido a la disposición de las bobinas y la disponibilidad de transistores unipolares.
- Menos componentes: Requieren menos elementos electrónicos para el control, lo que puede reducir el costo y la complejidad de los circuitos de control.
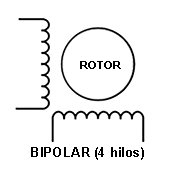
Motores paso a paso bipolares
Características principales
- En estos propulsores no hay un centro de toma de corriente en cada bobina. Las bobinas se conectan de forma directa o a través de puentes H para invertir la dirección de la corriente.
- Generalmente, ofrecen un mejor rendimiento en términos de torque y eficiencia en comparación con los unipolares.
- Requieren circuitos de control más complejos debido a la necesidad de invertir la dirección de la corriente en las bobinas.
Funcionamiento de los motores paso a paso bipolares
- Se activan mediante la inversión de la polaridad de la corriente en las bobinas en lugar de activar o desactivar bobinas individuales.
- Para girar el motor en una dirección, se aplica corriente en una dirección a través de las bobinas. Para girarlo en la dirección opuesta, se invierte la dirección de la corriente.
- Se requieren puentes H o circuitos de control similares para cambiar la dirección de la corriente en las bobinas.
Ventajas de los motores paso a paso bipolares
- Mayor torque: Tienen un mayor torque disponible en comparación con los unipolares, lo que los hace más adecuados para aplicaciones de carga pesada.
- Mayor eficiencia: Tienden a ser más eficaces en términos de energía debido a la falta de resistencia en las bobinas causada por el centro de toma de corriente.
- Mejor rendimiento general: Son ideales para aplicaciones que requieren movimientos precisos y fuerza.
En resumen, la elección entre un stepper motor a paso unipolar y uno bipolar depende de los requisitos específicos de la aplicación. Los unipolares son más sencillos de controlar y son adecuados para aplicaciones de baja carga y baja potencia, mientras que los bipolares ofrecen un mayor rendimiento en términos de torque y eficiencia, lo que los hace ideales para aplicaciones de carga pesada y alta precisión, aunque requieren circuitos de control más complejos.
¿Cómo conectar un motor paso a paso?
Depende del tipo de motor y del tipo de modo de funcionamiento en que queremos hacerlo trabajar. En general, emplearemos un drivers de motor paso a paso que incorporan puentes H, y no plantea dudas de conexión y varía según el modo de conexión. A continuación, explicaremos únicamente los casos de conexión con un puente H o modo bipolar, por ser lo más habitual.
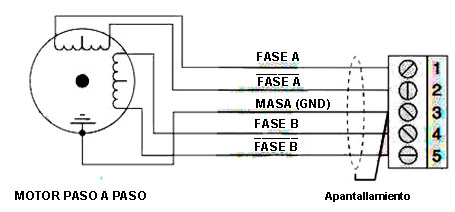
Motor paso a paso bipolar o de 4 cables
Es la conexión más sencilla. Tiene el mismo número de cables o hilos que en el controlador o driver de motor. Únicamente se ha apantallado la carcasa del motor a masa para evitar posibles interferencias.
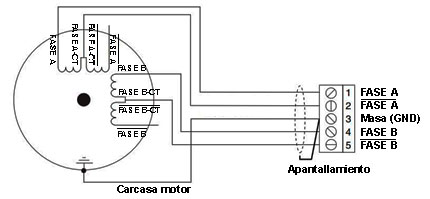
Motor paso a paso de 6 cables
En este caso tenemos un propulsor unipolar, que es igual que el bipolar anterior al que se le han añadido una toma media en cada bobinado del motor. En este caso podemos conectar de las siguientes formas:
- Bipolar de bobina completa: La mayoría de los modelos no exigen el uso de esas tomas centrales y pueden estar conectados como en el caso de la figura anterior.
- Bipolar de media bobina: En este caso, se reduce en gran medida el par del motor, por lo que necesitaremos voltajes adicionales para poder alcanzar el par requerido, pudiendo sobrecalentar nuestro motor. Se recomienda leer las especificaciones del fabricante. En cualquier caso la conexión es la que se describe en la imagen.
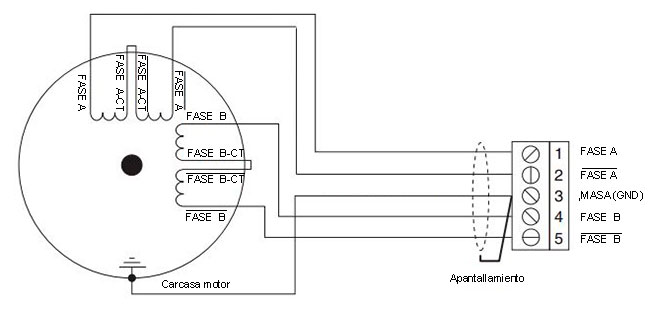
Motor paso a paso de 5 cables
Este tipo de propulsor es del tipo unipolar con 2 bobinados en el que las dos tomas intermedias de cada bobinado están unidas internamente. Hay que conectar los extremos de las bobinas a las salidas del driver o puente H, dejando el común de los bobinados sin conectar.
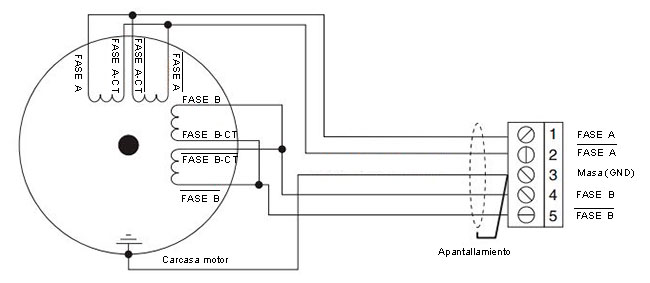
Motor paso a paso de 8 cables
En algunos propulsores, el fabricante opta por un diseño de 4 devanados con 8 cables. Esta característica permite poner los devanados en serie o en paralelo, según sea más importante la velocidad o el par del motor.
- Conexionado de un motor paso a paso de 8 cables como motor bipolar (devanados en serie)
- Conexionado de un motor paso a paso de 8 cables como motor bipolar (devanados en paralelo)
Tamaños comunes de motores paso a paso
Los stepper motors están disponibles en una variedad de tamaños y configuraciones estándar para adaptarse a diversas aplicaciones. Las dimensiones estándar se definen principalmente por su tamaño de montaje (que se mide en milímetros o pulgadas) y por su capacidad de par (torque). A continuación podemos ver algunos de los tamaños estándar más comunes:
- NEMA 17: Es uno de los más comunes y ampliamente utilizados. Estos motores paso a paso tienen una brida cuadrada con una dimensión de montaje de 1.7 x 1.7 pulgadas (43.18 x 43.18 mm) y se utilizan en una variedad de aplicaciones, desde impresoras 3D hasta máquinas CNC de tamaño mediano.
- NEMA 23: Estos propulsores tienen una brida cuadrada más grande con una dimensión de montaje de 2.3 x 2.3 pulgadas (58.42 x 58.42 mm). Son adecuados para aplicaciones que requieren un par más alto y se utilizan en máquinas CNC más grandes, impresoras industriales y equipos de automatización.
- NEMA 34: Se caracterizan por una brida cuadrada aún más grande con una dimensión de montaje de 3.4 x 3.4 pulgadas (86.36 x 86.36 mm). Son propulsores de alto par utilizados en aplicaciones industriales pesadas, como maquinaria de corte y equipos de carga.
- NEMA 11: Son más pequeños que los NEMA 17, con una dimensión de montaje de aproximadamente 1.1 x 1.1 pulgadas (28 x 28 mm). Se utilizan en aplicaciones donde el espacio es limitado y se necesita un par moderado.
- NEMA 14: Son aún más pequeños, con una dimensión de montaje de alrededor de 1.4 x 1.4 pulgadas (35 x 35 mm). Son ideales para aplicaciones compactas y ligeras.
- NEMA 08: Son los motores más pequeños, con una dimensión de montaje de aproximadamente 0.8 x 0.8 pulgadas (20 x 20 mm). Se utilizan en aplicaciones micro y miniaturizadas.
A veces, cualquiera de los modelos anteriores se comercializa con un husillo montado como eje del rotor. Sobre ese eje viene un soporte roscado que gira con las vueltas del motor. De manera que en conjunto tenemos un actuador lineal de excelente precisión.
Dentro de cada tamaño estándar, los motores paso a paso pueden variar en términos de longitud, par nominal, corriente nominal y otras especificaciones. La elección del tamaño y tipo de propulsor depende de los requisitos específicos de cada aplicación, como la carga que debe moverse, la precisión necesaria y el espacio disponible.



