Disponible
Disponible
La SparkFun VR IMU Breakout permite acceder a la tecnología de realidad virtual y seguimiento de orientación sin necesidad de invertir grandes cantidades de dinero. En el corazón de esta placa se encuentra el BNO086 de CEVA, un avanzado sensor IMU que integra acelerómetro, giroscopio y magnetómetro de tres ejes en un compacto System in Package (SiP) con un microcontrolador ARM Cortex-M0+ de 32 bits.
El BNO086 Inertial Measurement Unit es capaz de generar vectores de rotación precisos, especialmente indicados para aplicaciones VR y sistemas de referencia de rumbo, con un error estático de rotación igual o inferior a 2 grados. Todos los datos de los sensores se procesan internamente mediante fusión de sensores y corrección de deriva, proporcionando información de orientación fiable y lista para usar en proyectos que requieren detección de movimiento u orientación espacial.
La placa incorpora dos conectores I2C Qwiic, facilitando la conexión directa con otros dispositivos del ecosistema SparkFun Qwiic sin necesidad de soldadura. Para mayor flexibilidad, también dispone de pines estándar de paso 2,54 mm, lo que permite su uso en protoboard o en desarrollos personalizados.
El BNO086 es el reemplazo directo del BNO080 (EOL), originalmente diseñado para teléfonos Android orientados a gafas de realidad virtual. Esta nueva versión ofrece mejoras funcionales como fusión de acelerómetro de 14 bits, menor consumo en estado inactivo y calibración interactiva. Aunque se trata de un sensor potente con una interfaz compleja, la placa integra jumpers de configuración que permiten seleccionar entre dos direcciones I2C.
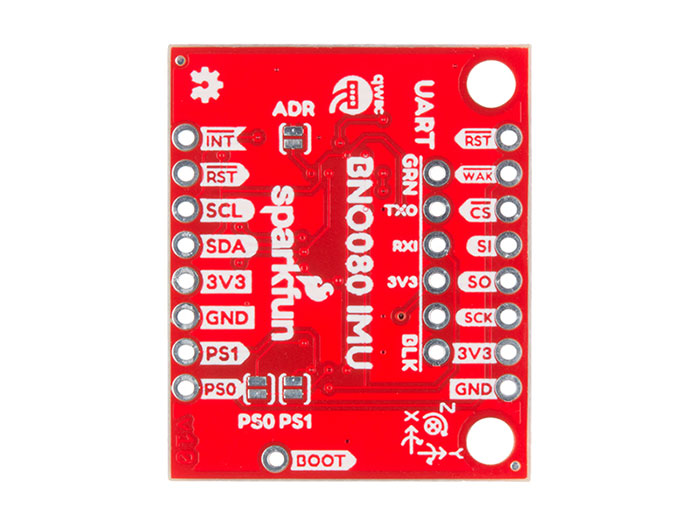
Además de I2C, el sensor admite comunicación mediante SPI y UART, ampliando las opciones de integración. La librería oficial basada en I2C proporciona acceso a vectores de rotación, aceleración, velocidad angular, campo magnético, conteo de pasos y clasificación de actividad, ideal para proyectos de seguimiento de movimiento en tiempo real.
| Voltaje de funcionamiento | 2.4 V – 3.6 V |
| Voltaje típico | Normalmente 3.3 V mediante cable Qwiic |
| Comunicaciones | |
| I2C (por defecto) | Hasta 400 kHz |
| SPI | Hasta 3 MHz |
| UART | 3 Mbps |
| Vector de rotación | |
| Error dinámico | 3.5° |
| Error estático | 2.0° |
| Vector de rotación para gaming | |
| Error dinámico | 2.5° |
| Error estático | 1.5° |
| Deriva dinámica del rumbo | 0.5° / min |
| Vector de rotación geomagnético | |
| Error dinámico de rotación | 4.5° |
| Error estático de rotación | 3.0° |
| Error del ángulo de gravedad | 1.5° |
| Precisión de aceleración lineal | 0.35 m/s2 |
| Precisión del acelerómetro | 0.3 m/s2 |
| Precisión del giroscopio | 3.1° / s |
| Precisión del magnetómetro | 1.4 µT |
| Puertos de conexión Qwiic | 2x |
| Dirección I2C | 0x4B (por defecto), 0x4A |
| Resistencias pull-up I2C | 2.2 kΩ |
| LED de alimentación | Sí |
| Jumpers | |
| LED de alimentación | |
| Resistencias pull-up I2C | |
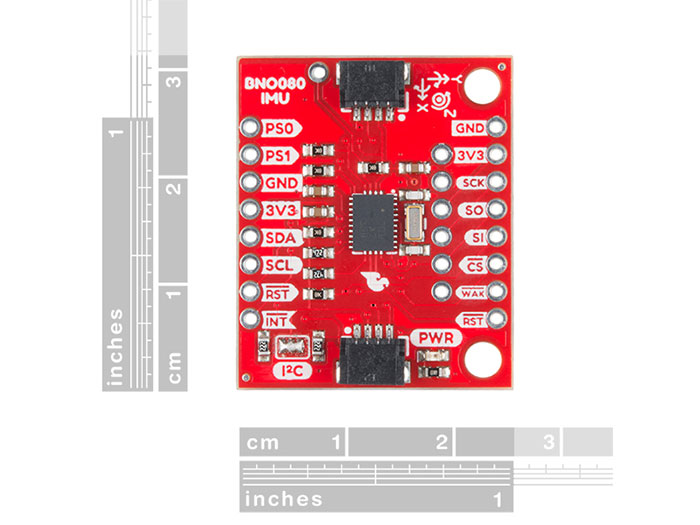
| Dimensiones de la placa | 1.0 in × 1.2 in (25.4 mm × 30.48 mm) |
| Peso | 3 g |