El BNO055 puede generar los siguientes datos del sensor:
- Orientación absoluta (vector de Euler, 100 Hz) Datos de orientación de tres ejes basados en una esfera de 360°
- Orientación absoluta (cuaternión, 100 Hz) Salida de cuaternión de cuatro puntos para una manipulación de datos más precisa
- Vector de velocidad angular (100 Hz) Tres ejes de 'velocidad de rotación' en rad/s
- Vector de aceleración (100 Hz) Tres ejes de aceleración (gravedad + movimiento lineal) en m/s^2
- Vector de intensidad del campo magnético (20 Hz) Detección de campo magnético de tres ejes en micro Tesla (uT)
- Vector de aceleración lineal (100 Hz) Tres ejes de datos de aceleración lineal (aceleración menos gravedad) en m/s^2
- Vector de gravedad (100 Hz) Tres ejes de aceleración gravitacional (menos cualquier movimiento) en m/s^2
- Temperatura (1Hz) Temperatura ambiente en grados centígrados
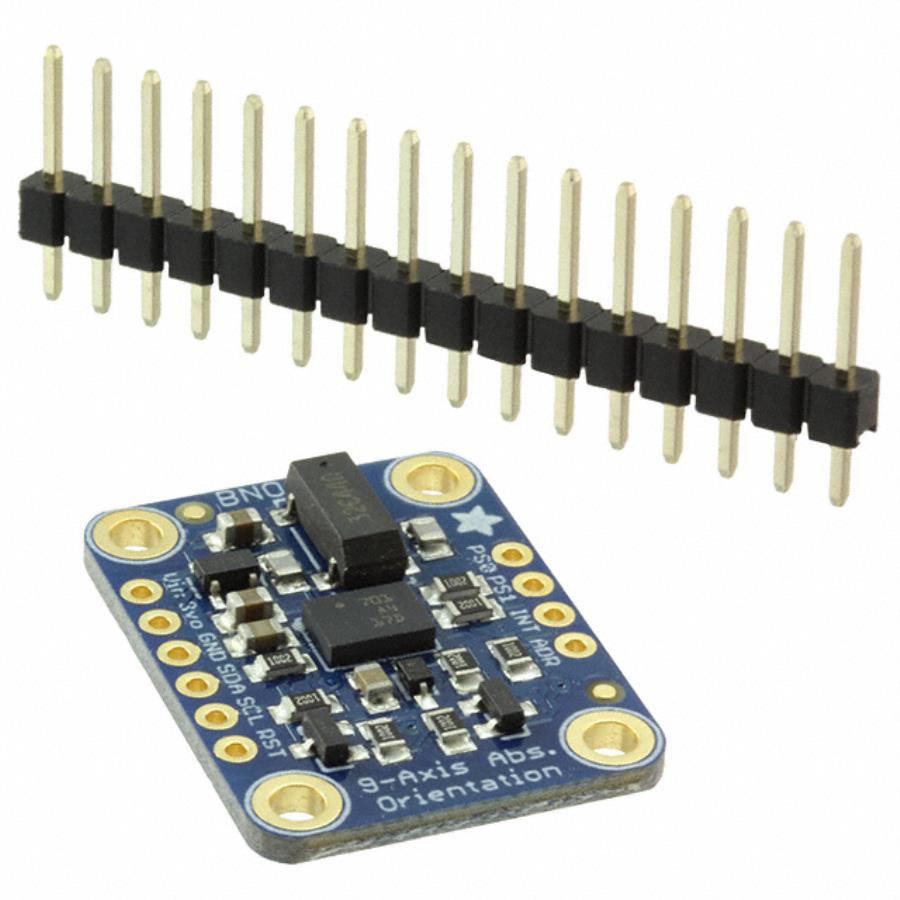
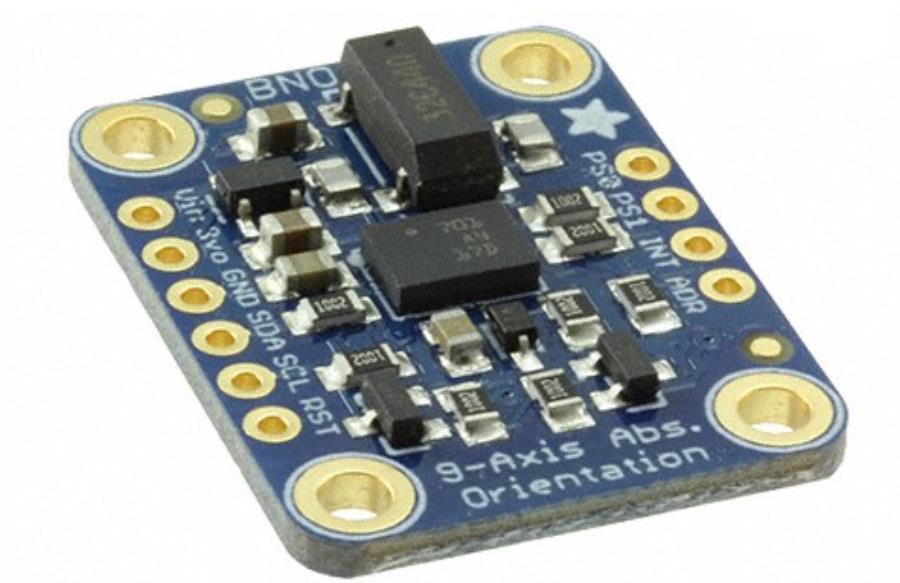
Se coloca este sensor en su propia conexión, completo con regulador de 3,3 V, cambio de nivel lógico para los pines de reinicio e I2C, un cristal externo de 32,768 KHz (recomendado para un mejor rendimiento) y conexiones para algunos otros pines que pueden resultar útiles.
Está ensamblado y probado, con un pequeño trozo de cabezal. Se requiere un poco de soldadura para conectar el cabezal a la PCB de conexión, pero es un trabajo bastante fácil.

 Producto agotado. Le podemos avisar cuanto esté disponible.
Producto agotado. Le podemos avisar cuanto esté disponible.