
 Disponible
Disponible
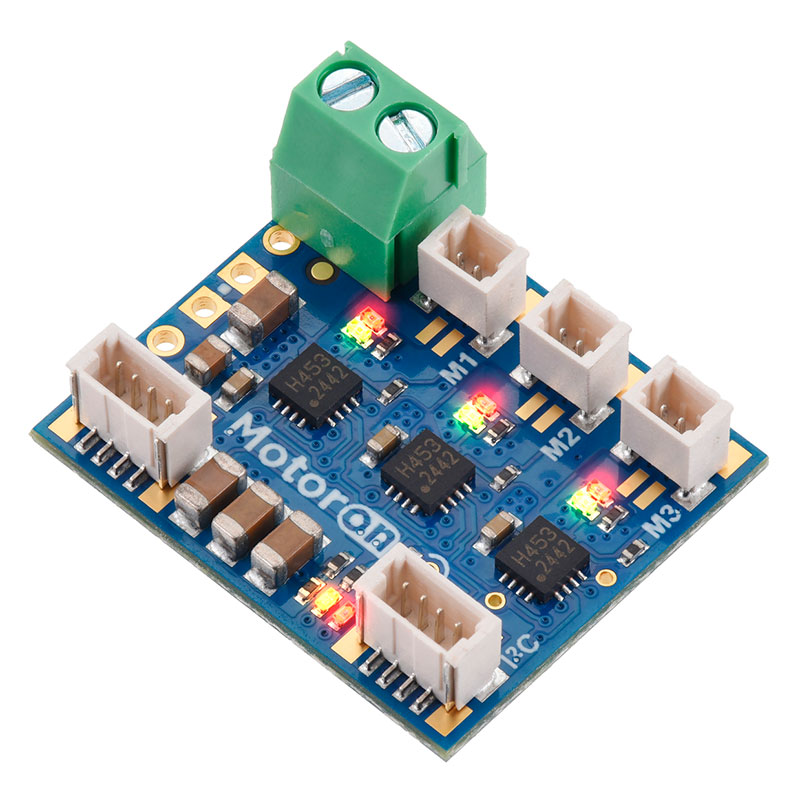
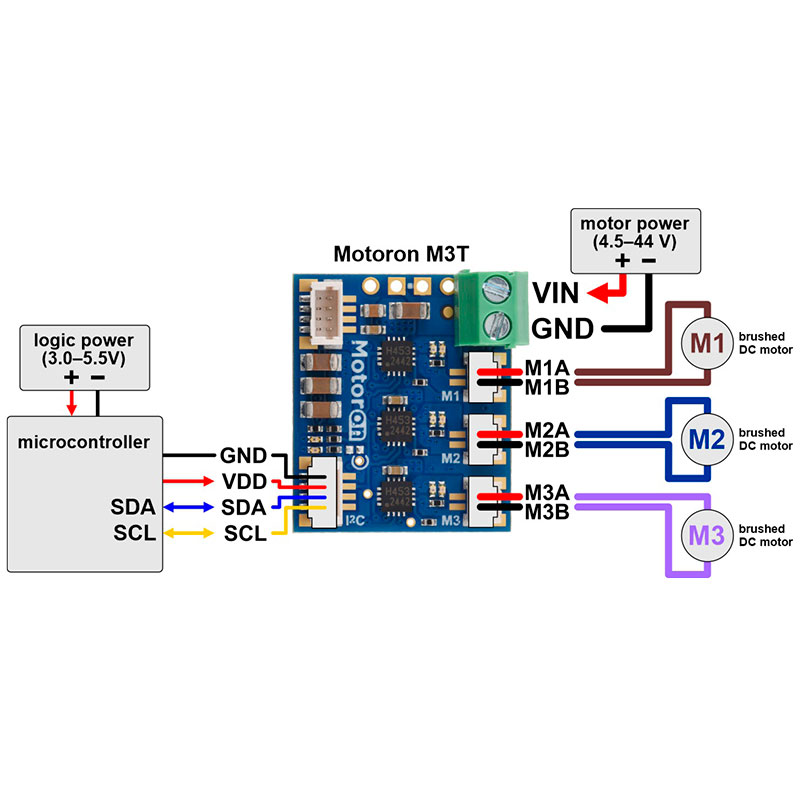
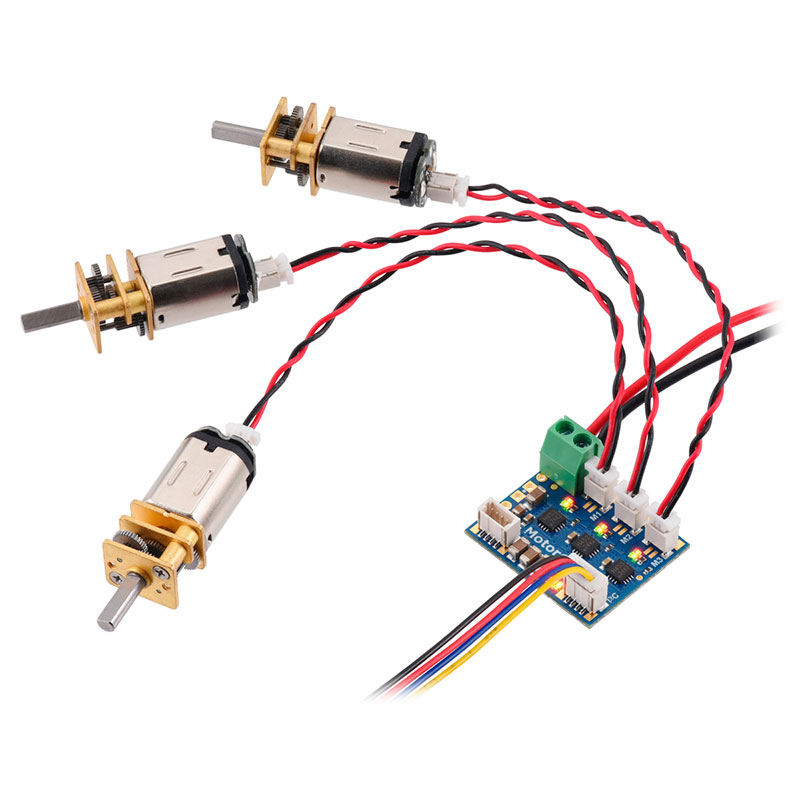
El Motoron M3T453 de Pololu (ref. 5082) es un controlador de motores por bus I²C compacto para gobernar hasta 3 micromotores (tres canales) de tipo motor DC con escobillas en ambos sentidos (bidireccional). Es una solución ideal para robótica, vehículos RC, automatización y proyectos con Arduino, Raspberry Pi, ESP32 o STM32, ya que reduce cableado y libera temporizadores: funciona con un único I²C en lugar de múltiples salidas PWM.
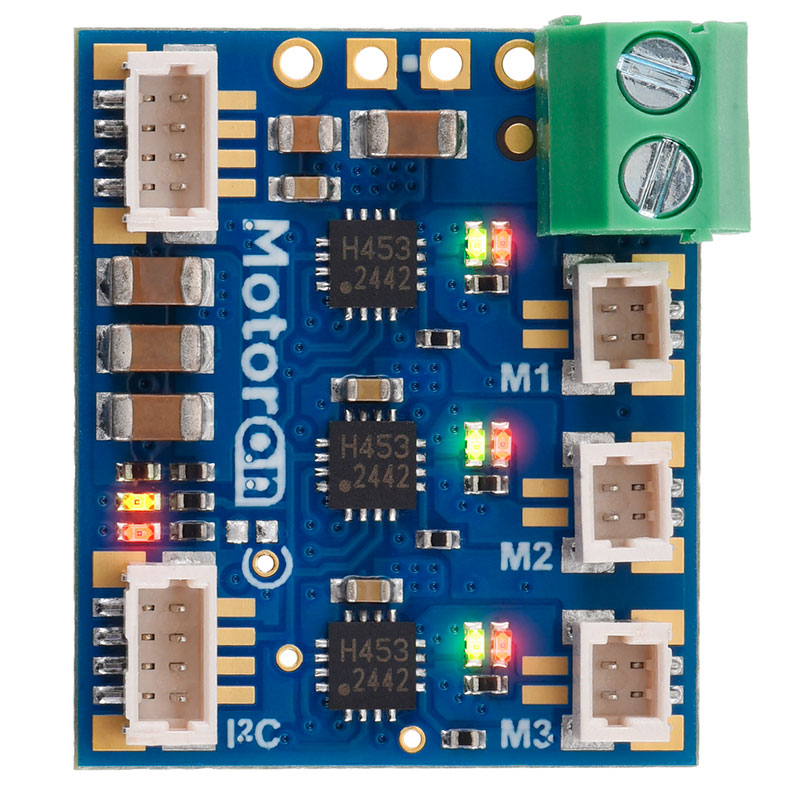
Esta versión viene ensamblada con conectores JST SH para señales y motores, más una regleta de bornas (bloque de terminales) soldada para la alimentación de potencia (VIN). Incluye dos conectores de 4 pines para I²C (entrada/salida) que permiten encadenar (daisy-chain) varios controladores o sensores en el mismo bus, con compatibilidad práctica con ecosistemas tipo Qwiic y STEMMA QT. Los conectores de motor (JST SH de 2 pines) facilitan la integración con micromotores y conjuntos compactos en espacios reducidos.
Además del control básico de velocidad y sentido, el driver ofrece funciones avanzadas para un movimiento más suave y seguro: parámetros de aceleración/deceleración, velocidad de arranque y retardo de cambio de dirección. Para afinar el comportamiento acústico y el par, dispone de múltiples opciones de frecuencia PWM (útil si buscas control silencioso o minimizar zumbidos). También incorpora protección contra inversión de polaridad en la alimentación de motores y opciones de robustez en comunicaciones como CRC (verificación) sobre I²C, además de timeout de comandos para detener motores si el controlador deja de recibir órdenes.
Si buscas una frase de compra muy específica (long-tail), este producto encaja en búsquedas como: “controlador I²C para 3 motores DC con JST SH y regleta de bornas”, “driver I²C triple para micromotores en Arduino sin PWM” o “controladora Motoron M3T453 Pololu para robótica con encadenado I²C”.
| Modelo | Motoron M3T453 (triple I²C) |
|---|---|
| Canales de motor | 3 (hasta 3 motores DC con escobillas, bidireccionales) |
| Interfaz de control | I²C (recomendado para control multiperiférico y daisy-chain) |
| Velocidad I²C | hasta 400 kHz |
| Rango de tensión de motores (VIN) | 4,5 V a 44 V (máximo absoluto) |
| Recomendación de batería | máximo nominal aprox. 32 V (margen para rizado de línea) |
| Corriente por canal | 0,8 A continua; 2 A pico (< 1 s) |
| Limitación de corriente | umbral = Vlogic × 0,625 A/V |
| Tensión lógica (Vlogic) | 3,0 V a 5,5 V |
| Protección inversión polaridad | Sí (funciona hasta 40 V) |
| Frecuencia PWM | 8 opciones de 1 kHz a 80 kHz |
| Sensado de corriente | disponible en canales 1 y 2 |
| Medición de tensión VIN | Sí (monitorización de alimentación) |
| Conectores (versión ensamblada) | JST SH para I²C (2× 4 pines) y motores (conectores de 2 pines); regleta de bornas soldada para VIN |
| Dimensiones | 0,85″ × 1,0″ (aprox. 21,6 × 25,4 mm) |
| Peso | 3,2 g |
| Identificación PCB | mc3t41b (código) / 0J15923 (marcado) |



