
 Disponível
Disponível
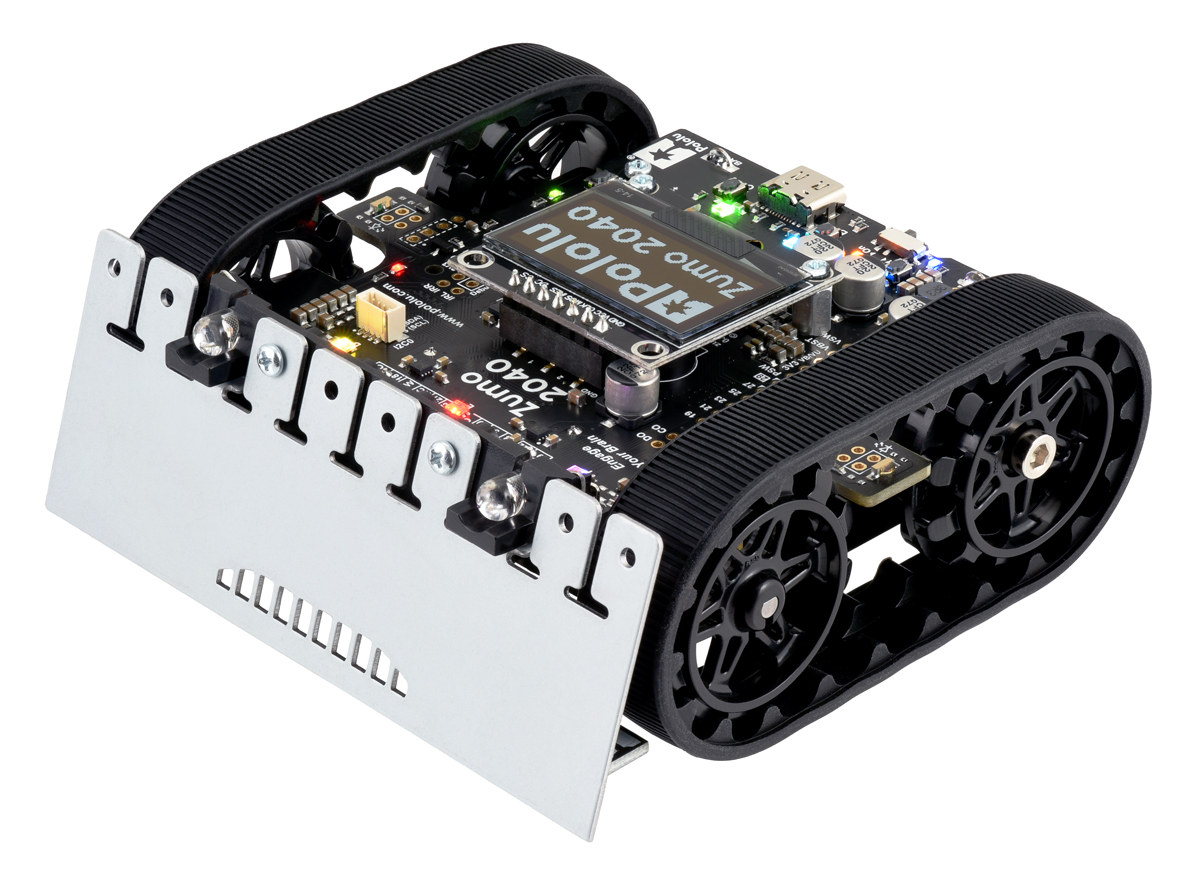
O Pololu Zumo 2040 Robot montado com motores HP 75:1 é uma avançada plataforma de robótica educativa, desenvolvimento de algoritmos e competição, concebida para utilizadores que procuram um robô programável compacto, rápido e pronto a utilizar. Baseado no poderoso microcontrolador Raspberry Pi RP2040, este robô de lagartas combina elevado desempenho de processamento com um conjunto completo de sensores e atuadores integrados.
Esta versão inclui dois micromotores metálicos HP com redução 75:1, proporcionando um excelente equilíbrio entre velocidade e binário. A sua configuração torna-o particularmente adequado para aplicações que exigem movimentos rápidos, navegação dinâmica e competições Mini Sumo. O seu formato compacto inferior a 10 x 10 cm cumpre os requisitos habituais desta categoria de competição.
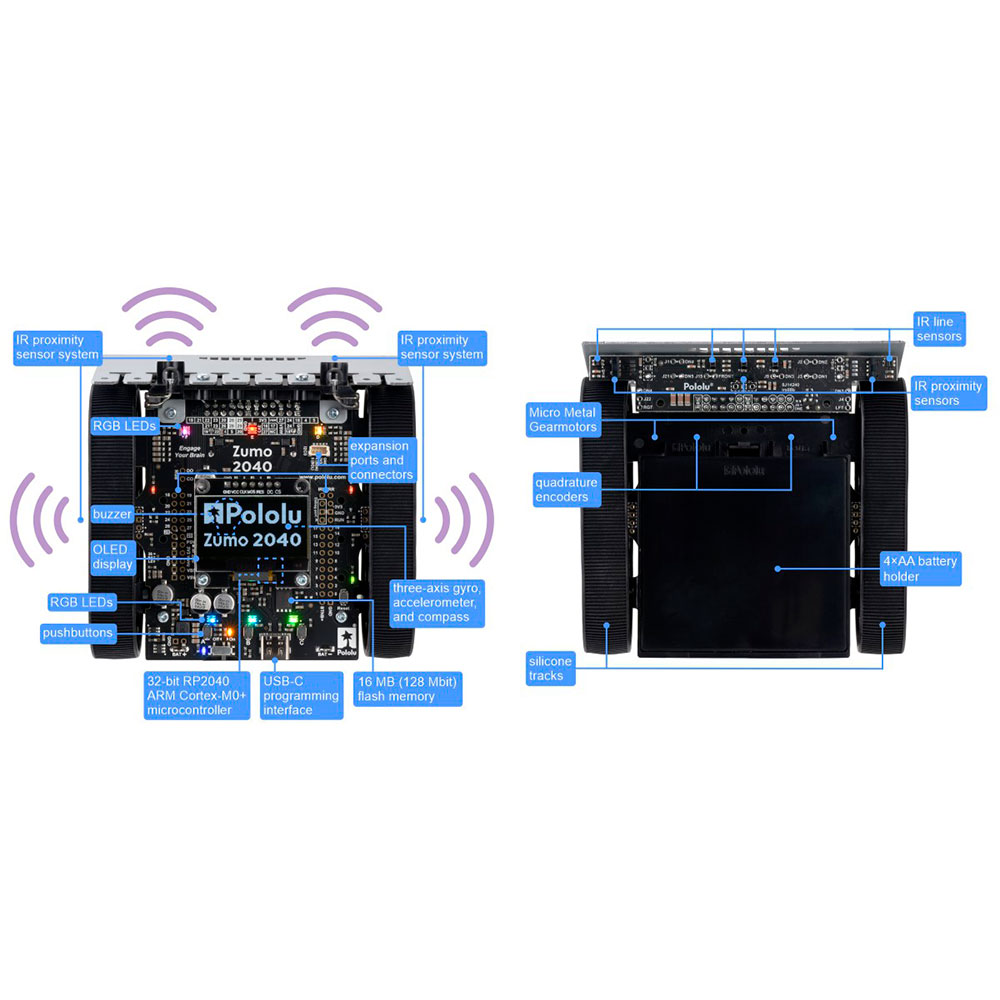
O sistema integra encoders em quadratura para controlo preciso da velocidade e posição, sensores de proximidade por infravermelhos para deteção de obstáculos, sensores refletivos para seguimento de linha e uma completa unidade de medição inercial (IMU) com acelerómetro, giroscópio e magnetómetro.
O processador RP2040 dual-core funciona a 125 MHz e pode ser programado em Python, MicroPython, Arduino, C e C++. A memória Flash de 16 MB permite armazenar aplicações avançadas de robótica, navegação autónoma e controlo inteligente.
Inclui ainda um ecrã OLED gráfico de 128 x 64 píxeis, seis LEDs RGB programáveis e buzzer integrado. É fornecido totalmente montado e pronto a utilizar, bastando instalar quatro pilhas AA e ligar um cabo USB-C para iniciar a programação.
Uma excelente escolha para quem procura um robô educativo baseado em Raspberry Pi RP2040, uma plataforma de robótica móvel com sensores integrados ou um robô Mini Sumo programável de alta velocidade.
| Fabricante | Pololu |
| Modelo | Zumo 2040 Robot (Montado com Motores HP 75:1) |
| Referência | 5012 |
| Microcontrolador | Raspberry Pi RP2040 |
| Arquitetura CPU | Dual-Core Arm Cortex-M0+ |
| Frequência de relógio | 125 MHz |
| Memória RAM | 264 KB |
| Memória Flash | 16 MB |
| Linguagens de programação | Python, MicroPython, Arduino, C e C++ |
| Motores incluídos | 2 × Micro Metal Gearmotor HP 75:1 com eixo prolongado |
| Relação de redução | 75:1 |
| Velocidade sem carga (6 V) | 400 RPM |
| Binário de bloqueio (6 V) | 22 oz·in |
| Corrente de bloqueio (6 V) | 1600 mA |
| Velocidade máxima do robô (500 g, 6 V) | 65 cm/s |
| Controladores de motor | Ponte H dupla integrada |
| Encoders | 2 encoders em quadratura integrados |
| Sensores de seguimento de linha | 5 sensores refletivos inferiores |
| Sensores de proximidade | Infravermelhos frontais e laterais |
| IMU | Acelerómetro, giroscópio e magnetómetro de 3 eixos |
| Ecrã | OLED gráfico 128 × 64 píxeis |
| LEDs RGB | 6 LEDs RGB programáveis |
| Interface USB | USB Tipo C |
| Alimentação | 4 pilhas AA |
| Dimensões | 96 × 99 × 39 mm |
| Peso | 160 g (sem pilhas) |
| Montagem | Totalmente montado |
| Programador externo necessário | Não |
| Código PCB | zum03a |



