
 Disponível
Disponível
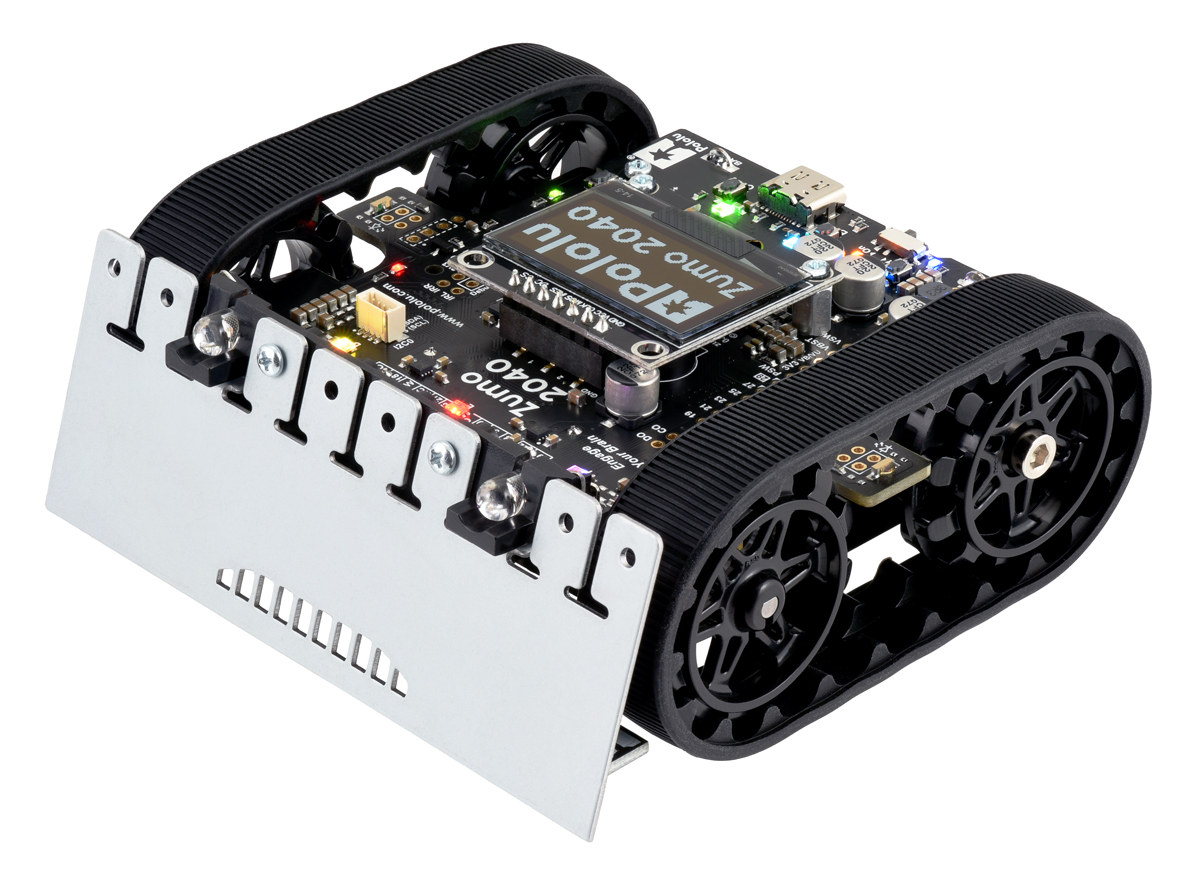
O Pololu Zumo 2040 Robot montado com motores HP 100:1 é uma avançada plataforma de robótica educativa, desenvolvimento de algoritmos e competição, concebida para utilizadores que procuram um robô programável compacto, potente e pronto a utilizar. Baseado no poderoso microcontrolador Raspberry Pi RP2040, este robô de lagartas combina elevada capacidade de processamento com um conjunto completo de sensores e atuadores integrados.
Esta versão inclui dois micromotores metálicos HP com redução 100:1, oferecendo elevado binário para aplicações que exigem força, precisão e controlo avançado de movimento. Graças ao seu formato compacto inferior a 10 x 10 cm, cumpre os requisitos das competições Mini Sumo, sendo igualmente ideal para projetos de automação robótica, aprendizagem STEM, navegação autónoma e seguimento de linha.
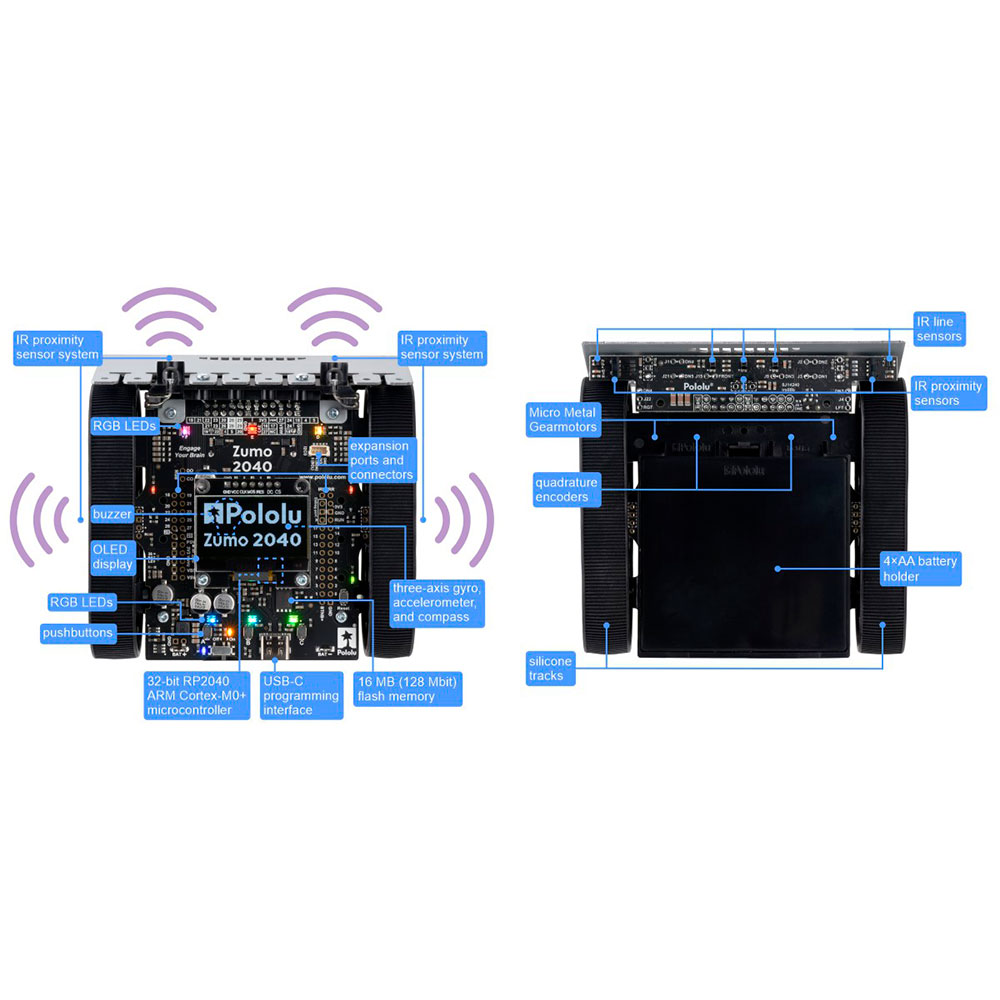
O sistema integra encoders em quadratura para controlo preciso de velocidade e posição, sensores de proximidade por infravermelhos para deteção de obstáculos, sensores refletivos para seguimento de linha e uma completa unidade de medição inercial (IMU) com acelerómetro, giroscópio e magnetómetro. Inclui ainda um ecrã OLED gráfico, buzzer e seis LEDs RGB programáveis.
O processador RP2040 dual-core funciona a 125 MHz e pode ser programado em Python, MicroPython, Arduino, C e C++, tornando-o adequado tanto para iniciantes como para aplicações profissionais. A memória Flash de 16 MB permite armazenar aplicações avançadas de controlo e navegação.
Fornecido totalmente montado, não requer soldadura nem montagem adicional. Basta instalar quatro pilhas AA e ligar um cabo USB-C para começar a programar. É uma excelente escolha para quem procura um robô educativo programável pronto a usar, uma plataforma de robótica móvel com sensores integrados ou um robô Mini Sumo baseado em Raspberry Pi RP2040.
| Fabricante | Pololu |
| Modelo | Zumo 2040 Robot (Montado com Motores HP 100:1) |
| Referência | 5013 |
| Microcontrolador | Raspberry Pi RP2040 |
| Arquitetura CPU | Dual-Core Arm Cortex-M0+ |
| Frequência de relógio | 125 MHz |
| Memória RAM | 264 KB |
| Memória Flash | 16 MB |
| Linguagens de programação | Python, MicroPython, Arduino, C e C++ |
| Motores incluídos | 2 × Micro Metal Gearmotor HP com eixo prolongado |
| Relação de redução | 100:1 |
| Velocidade sem carga (6 V) | 320 RPM |
| Binário de bloqueio (6 V) | 30 oz·in |
| Corrente de bloqueio (6 V) | 1600 mA |
| Velocidade máxima do robô | 50 cm/s |
| Controladores de motor | Ponte H dupla integrada |
| Encoders | 2 encoders em quadratura integrados |
| Sensores de seguimento de linha | 5 sensores refletivos inferiores |
| Sensores de proximidade | Infravermelhos frontais e laterais |
| IMU | Acelerómetro, giroscópio e magnetómetro de 3 eixos |
| Ecrã | OLED gráfico 128 × 64 píxeis |
| LEDs RGB | 6 LEDs RGB programáveis |
| Interface USB | USB Tipo C |
| Alimentação | 4 pilhas AA |
| Dimensões | 96 × 99 × 39 mm |
| Peso | 160 g (sem pilhas) |
| Montagem | Totalmente montado |
| Programador externo necessário | Não |



