


Les Moteurs pas à pas sont des moteurs à courant continu dans lesquels la rotation est divisée en étapes. Ils assurent un contrôle précis, c'est pourquoi ils sont utilisés dans les imprimantes, les commandes CNC, la robotique, l'industrie, etc.
Qu'est-ce qu'un moteur pas à pas ou stepper motor ?
Un moteur pas à pas, ou stepper motor, est un type de moteur électrique utilisé pour convertir des impulsions électriques en mouvements discrets et précis. C'est ce qu'on appelle « pas à pas » car le moteur avance d'un certain nombre de pas individuels en réponse à chaque impulsion électrique qu'il reçoit. Ces moteurs sont largement utilisés dans les applications nécessitant un positionnement précis, telles que les imprimantes 3D, les machines CNC, les robots, les caméras et autres systèmes de contrôle de mouvement.
Le fonctionnement de base d'un moteur pas à pas repose sur l'interaction entre un rotor (généralement une série d'aimants permanents) et un ensemble de bobines électromagnétiques disposées autour du rotor.
Comment fonctionne un moteur pas à pas ?
Un moteur pas à pas est un dispositif électromécanique qui convertit les impulsions électriques en mouvements mécaniques discrets et précis. Les composants et le fonctionnement détaillé d'un moteur pas à pas sont décrits ci-dessous :
Composants de base:
Stator : Le stator est la partie fixe du moteur et est constitué d'un ensemble de bobines électromagnétiques disposées autour du rotor. Ces bobines sont la clé pour générer le mouvement du moteur.
Rotor : Le rotor est la partie mobile du moteur et se compose généralement d'un aimant permanent ou d'un ensemble d'aimants permanents. Le rotor est situé au centre du stator et peut tourner par étapes discrètes.
Arbre de sortie : L'arbre de sortie est la partie du rotor utilisée pour connecter le moteur à la charge qui doit être déplacée ou positionnée. Grâce à la rotation du rotor, l'arbre de sortie effectue le travail mécanique souhaité.
Principe de fonctionnement:
- Séquence de bobines : Pour déplacer le rotor d'un moteur pas à pas, un ensemble spécifique de bobines électromagnétiques dans le stator doit être activé séquentiellement. Ces bobines sont divisées en groupes et peuvent être connectées de différentes manières, selon le type de moteur pas à pas (unipolaire ou bipolaire).
- Impulsions électriques : des impulsions électriques sont envoyées à travers les bobines du stator. Chaque impulsion électrique active une bobine ou un groupe de bobines spécifique pendant une courte période de temps. La direction et l'ampleur du mouvement dépendent de la séquence d'activation des bobines et de la façon dont elles sont polarisées.
- Mouvement pas à pas : à chaque impulsion électrique, le rotor du moteur pas à pas avance d'un pas dans la direction déterminée par la séquence d'activation des bobines. Chaque pas représente un angle prédéfini, généralement de 1,8 degrés pour les moteurs à 200 pas par tour. Par conséquent, pour faire tourner le rotor sur un cercle complet (360 degrés), 200 impulsions sont nécessaires.
- Contrôle de position : Le contrôle de position est obtenu en envoyant le nombre correct d'impulsions électriques dans la séquence appropriée. En contrôlant le nombre et la direction des impulsions électriques envoyées au moteur, le rotor et donc la charge connectée à l'arbre de sortie peuvent être positionnés avec précision.
- En résumé : Ainsi, dans ce type de moteur, nous avons un stator fixe et un rotor monté sur un arbre qui tourne grâce à un champ magnétique créé par les bobines du stator. Lorsqu'une bobine est alimentée, un électro-aimant se forme qui attire un aimant dans le rotor, le faisant tourner. En alternant entre les bobines, différentes étapes de mouvement sont obtenues, notamment des pas complets, des demi-pas et des micropas. En bref, le moteur pas à pas fonctionne par attraction magnétique entre le stator et le rotor, permettant un contrôle précis du mouvement.
Modes de fonctionnement d'un moteur pas à pas
Moteur pas à pas en mode pas à pas
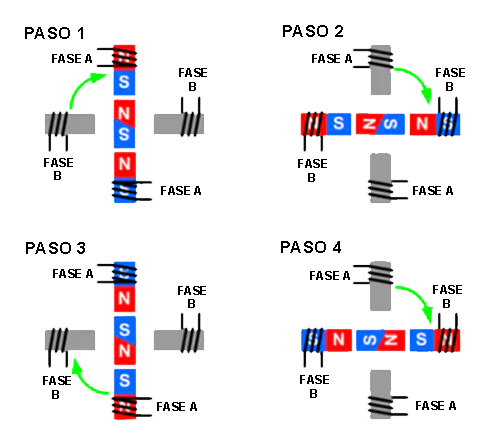
Dans ce mode, le moteur tourne selon des angles prédéfinis, par exemple 1,8°, ce qui signifie que 200 pas sont nécessaires pour une rotation complète (200×1,8° = 360°). Le mouvement de l'arbre est obtenu en alimentant une ou deux bobines. L'utilisation d'une seule bobine nécessite moins de puissance de la part du contrôleur, tandis que l'utilisation de deux bobines opposées augmente la puissance, la vitesse et le couple du moteur.
La figure ci-dessous nous montre comment cela fonctionne en mode pas à pas avec une alimentation biphasée :
Moteur pas à pas en mode demi-pas
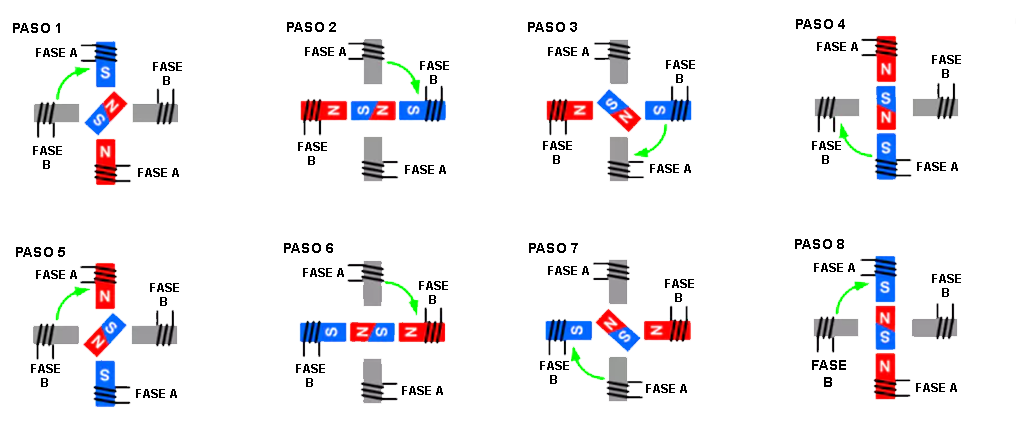
En mode demi-pas, la course du rotor est divisée par 2, ce qui signifie qu'une seule course vaut 0,9° au lieu de 1,8° dans l'exemple ci-dessus. Cela donne 400 pas par tour complet. Dans ce mode, les deux bobines du moteur reçoivent de l'énergie en alternance, ce qui augmente le couple par rapport au fonctionnement en mode monophasé. Cela rend également le fonctionnement du moteur plus fluide et double la résolution angulaire.
La figure ci-dessous montre le fonctionnement du moteur pas à pas en demi-pas avec une alimentation biphasée :
Moteur pas à pas en mode micropas
Le pas nominal est divisé en sections plus courtes qu'un demi-pas, avec un rapport de division maximum de 256. Les positions précises du rotor sont contrôlées par le flux magnétique généré par les bobines alimentées par des ondes échelonnées. Ce mode est idéal pour les applications qui nécessitent un fonctionnement fluide et une haute précision.
Cependant, lors de l’utilisation du micropas, il est important de prendre en compte les exigences de vitesse de l’application. La réactance inductive des bobines augmente avec la fréquence de commutation du courant dans le moteur, ce qui peut diminuer le courant moyen et, par conséquent, le couple du moteur. Cela peut entraîner des problèmes tels que des oscillations, des arrêts du rotor ou des pertes de pas dans la machine entraînée. Par conséquent, il est crucial de consulter la fiche technique du moteur, qui doit inclure un graphique montrant le couple en fonction de la fréquence du courant dans les bobines lors de l'utilisation du micropas.
Quels types de moteurs pas à pas existe-t-il ?
Moteurs pas à pas unipolaires :
- Caractéristiques principales:
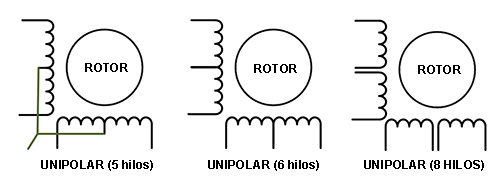
- Dans les moteurs pas à pas unipolaires, chaque bobine possède un centre de prise de courant (point médian) et est connectée à un transistor de commutation. Ils comportent généralement 5, 6 ou 8 fils de connexion de sortie, selon que les points médians des deux bobines sont réunis ou indépendants.
- Ils sont plus faciles à contrôler que les moteurs bipolaires en raison de leur disposition de bobines et de la possibilité d'utiliser des transistors unipolaires.
- Ils ont généralement moins de couple et d'efficacité que les moteurs bipolaires, ce qui les rend plus adaptés aux applications à faible charge et faible consommation.
- Fonctionnement :
- Dans un moteur pas à pas unipolaire, les bobines sont activées séquentiellement selon un modèle fixe pour faire avancer le rotor par étapes discrètes.
- Pour faire tourner le moteur dans un sens, les bobines sont alimentées dans un ordre spécifique (généralement une bobine est activée à la fois), et pour le faire tourner dans le sens opposé, l'ordre d'activation des bobines est inversé.
- Chaque bobine est connectée via un transistor unipolaire qui est activé et désactivé pour activer ou désactiver le courant traversant la bobine, créant ainsi un champ magnétique qui pousse ou tire sur le rotor.
- Avantages des moteurs pas à pas unipolaires :
- Facilité de contrôle : Ils sont plus faciles à contrôler grâce à la disposition des bobines et à la disponibilité de transistors unipolaires.
- Moins de composants : ils nécessitent moins de composants électroniques pour le contrôle, ce qui peut réduire le coût et la complexité des circuits de contrôle.
Moteurs pas à pas bipolaires :
- Caractéristiques principales:
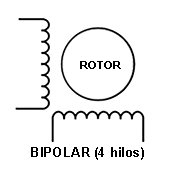
- Dans les moteurs pas à pas bipolaires, il n'y a pas de centre de prise de courant dans chaque bobine et les bobines sont connectées directement ou via des ponts en H pour inverser le sens du courant.
- Ils offrent généralement de meilleures performances en termes de couple et de rendement par rapport aux moteurs unipolaires.
- Ils nécessitent des circuits de contrôle plus complexes en raison de la nécessité d’inverser le sens du courant dans les bobines.
- Fonctionnement :
- Les moteurs pas à pas bipolaires sont activés en inversant la polarité du courant dans les bobines plutôt qu'en activant ou désactivant des bobines individuelles.
- Pour faire tourner le moteur dans un sens, le courant est appliqué dans un sens à travers les bobines, et pour le faire tourner dans le sens opposé, le sens du courant est inversé.
- Des ponts en H ou des circuits de commande similaires sont nécessaires pour changer la direction du courant dans les bobines.
- Avantages des moteurs pas à pas bipolaires :
- Couple plus important : ils ont un couple disponible plus élevé que les moteurs unipolaires, ce qui les rend plus adaptés aux applications lourdes.
- Efficacité supérieure : Ils ont tendance à être plus économes en énergie en raison du manque de résistance dans les bobines provoqué par le centre de la prise.
- Meilleures performances globales : ils sont idéaux pour les applications qui nécessitent des mouvements et une force précis.
En résumé, le choix entre un moteur pas à pas unipolaire et un moteur bipolaire dépend des besoins spécifiques de l'application. Les moteurs unipolaires sont plus faciles à contrôler et conviennent aux applications à faible charge et faible puissance, tandis que les moteurs bipolaires offrent des performances supérieures en termes de couple et d'efficacité, ce qui les rend idéaux pour les applications à charge lourde et haute précision, bien qu'ils nécessitent des circuits de contrôle plus complexes.
Comment connecter un moteur pas à pas ?
Cela dépendra du type de moteur dont nous disposons et du type de mode de fonctionnement que nous souhaitons faire fonctionner le moteur. En général, nous utiliserons des drivers de moteur pas à pas qui intègrent des ponts en H, et ne soulèvent pas de questions de connexion et varient en fonction du mode de connexion. L'article est trop complet pour les besoins de cet article et nous n'expliquerons que les cas de connexion avec un pont en H ou en mode bipolaire, car c'est le plus courant.
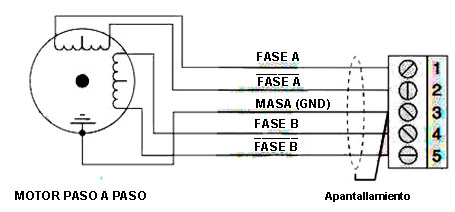
Moteur pas à pas bipolaire ou 4 fils
La connexion de ces moteurs est la plus simple. Nous avons le même nombre de câbles ou de fils que dans le contrôleur ou le pilote de moteur. Seul le boîtier du moteur a été protégé de la terre pour éviter d'éventuelles interférences.
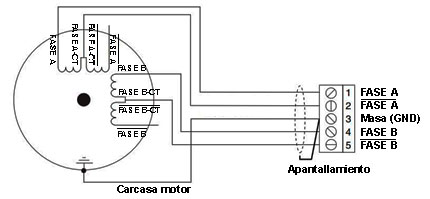
Moteur pas à pas à 6 fils
Dans ce cas, nous avons un moteur pas à pas unipolaire, identique au précédent bipolaire auquel une prise moyenne a été ajoutée à chaque enroulement du moteur. Dans ce cas, nous pouvons nous connecter des manières suivantes :
- Bobine complète bipolaire : Beaucoup de ces moteurs ne nécessitent pas l'utilisation de ces prises centrales et peuvent également être connectés comme dans le cas de la figure précédente.
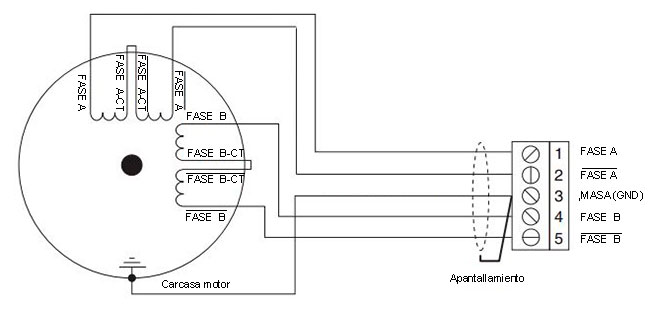
- Demi-bobine bipolaire : Dans ce cas, le couple moteur est fortement réduit, nous aurons donc besoin de tensions supplémentaires pour pouvoir atteindre le couple requis, ce qui pourrait surchauffer notre moteur. En ce sens, il est conseillé de lire les spécifications du motoriste. Dans tous les cas la connexion serait la suivante :
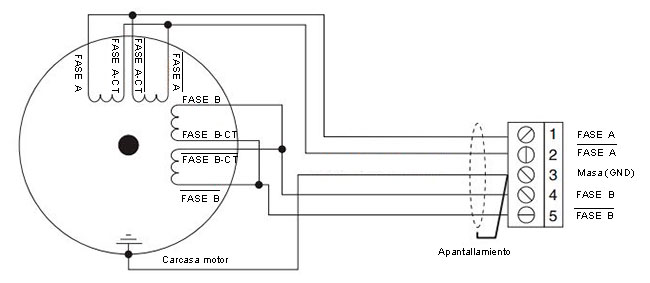
Moteur pas à pas à 5 fils
Ce type de moteur pas à pas est un type unipolaire à 2 enroulements dans lequel les deux prises médianes de chaque enroulement sont reliées en interne. Nous connecterions les extrémités des bobines aux sorties du pilote ou du pont en H, laissant les bobines communes non connectées.
Moteur pas à pas à 8 fils
Dans certains moteurs, le constructeur opte pour une conception à 4 bobinages avec 8 câbles, ce qui permet de mettre les bobinages en série ou en parallèle, selon que la vitesse ou le couple du moteur est plus important.
- Câblage d'un moteur pas à pas à 8 fils en moteur bipolaire (enroulements en série)
- Câblage d'un moteur pas à pas 8 fils en moteur bipolaire (enroulements en parallèle)
Tailles courantes de moteurs pas à pas
Les moteurs pas à pas sont disponibles dans une variété de tailles et de configurations standard pour s'adapter à diverses applications. Les tailles standard sont définies principalement par leur taille de montage, mesurée en millimètres ou en pouces, et par leur capacité de couple. Vous trouverez ci-dessous quelques-unes des tailles standard courantes de moteurs pas à pas :
NEMA 17 : C'est l'une des tailles les plus courantes et les plus utilisées. Les moteurs pas à pas NEMA 17 ont une bride carrée avec une dimension de montage de 1,7 x 1,7 pouces (43,18 x 43,18 mm) et sont utilisés dans une variété d'applications, des imprimantes 3D aux machines CNC de taille moyenne.
NEMA 23 : les moteurs pas à pas NEMA 23 ont une bride carrée plus grande avec une dimension de montage de 2,3 x 2,3 pouces (58,42 x 58,42 mm). Ces moteurs conviennent aux applications nécessitant un couple plus élevé et sont utilisés dans les grandes machines CNC, les imprimantes industrielles et les équipements d'automatisation.
NEMA 34 : les moteurs pas à pas NEMA 34 ont une bride carrée encore plus grande avec une dimension de montage de 3,4 x 3,4 pouces (86,36 x 86,36 mm). Ce sont des moteurs à couple élevé utilisés dans les applications industrielles lourdes, telles que les machines de découpe et les équipements de chargement.
NEMA 11 : Ces moteurs sont plus petits que NEMA 17, avec une dimension de montage d'environ 1,1 x 1,1 pouces (28 x 28 mm). Ils sont utilisés dans les applications où l'espace est limité et où un couple modéré est nécessaire.
NEMA 14 : les moteurs pas à pas NEMA 14 sont encore plus petits, avec une dimension de montage d'environ 1,4 x 1,4 pouces (35 x 35 mm). Ils sont idéaux pour les applications compactes et légères.
NEMA 08 : Ce sont les plus petits moteurs avec une dimension de montage d'environ 0,8 x 0,8 pouces (20 x 20 mm). Ils sont utilisés dans des applications micro et miniaturisées.
Il arrive parfois que l'un des modèles précédents soit également commercialisé avec une broche montée comme arbre de rotor. Sur cet arbre se trouve un support fileté qui tourne avec les tours du moteur. Nous avons donc ensemble un actionneur linéaire d’une excellente précision. Voir l'actionneur linéaire basé sur un moteur pas à pas
Veuillez noter qu'au sein de chaque taille standard, les moteurs pas à pas peuvent varier en termes de longueur, de couple nominal, de courant nominal et d'autres spécifications. Le choix de la taille et du type de moteur pas à pas dépendra des exigences spécifiques de votre application, telles que la charge à déplacer, la précision requise et l'espace disponible.
