Disponible
Disponible
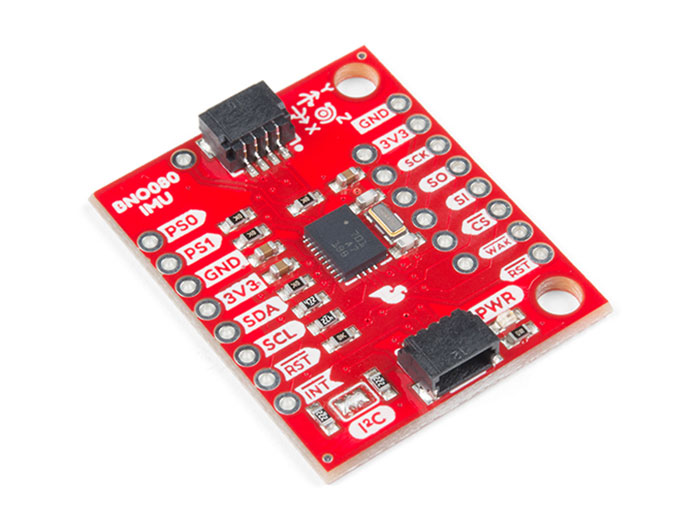
La SparkFun VR IMU Breakout permet d’accéder à la technologie de réalité virtuelle et de suivi d’orientation sans avoir à investir des sommes importantes. Au cœur de cette carte se trouve le BNO086 de CEVA, un capteur IMU avancé intégrant un accéléromètre, un gyroscope et un magnétomètre triaxiaux dans un System in Package (SiP) compact avec un microcontrôleur ARM Cortex-M0+ 32 bits.
La centrale inertielle BNO086 génère des vecteurs de rotation précis, parfaitement adaptés aux applications VR et aux systèmes de référence de cap, avec une erreur statique de rotation inférieure ou égale à 2 degrés. Les données issues des capteurs sont traitées en interne par fusion de capteurs et correction de dérive, fournissant des informations d’orientation fiables et directement exploitables pour les projets nécessitant la détection de mouvement ou l’orientation spatiale.
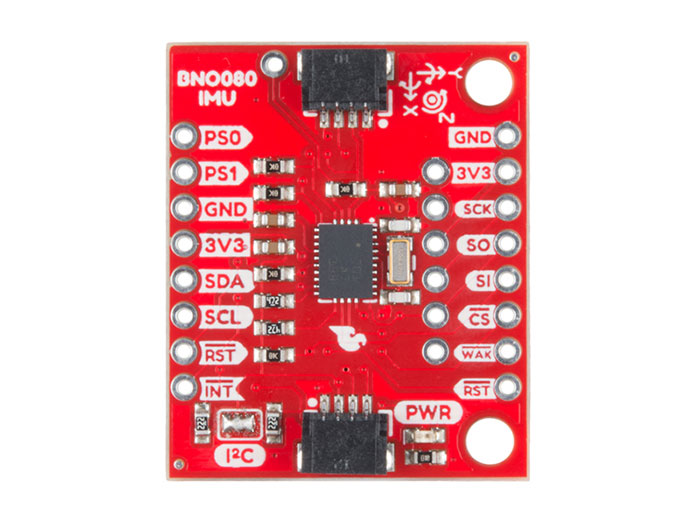
Cette carte breakout est équipée de deux connecteurs I2C Qwiic, facilitant l’intégration au système SparkFun Qwiic sans aucune soudure. Elle dispose également de broches au pas standard de 2,54 mm, permettant une utilisation sur breadboard ou dans des conceptions personnalisées.
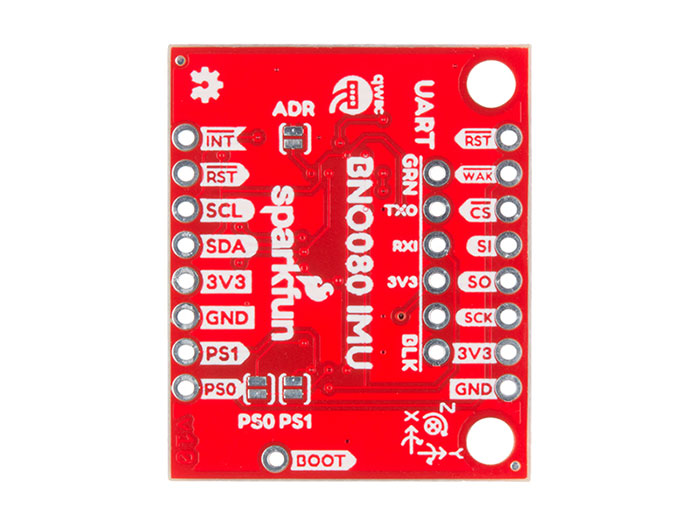
Le BNO086 est le remplaçant direct du BNO080 (EOL), initialement conçu pour les smartphones Android destinés aux casques de réalité virtuelle. Cette version intègre des améliorations fonctionnelles telles que la fusion de l’accéléromètre sur 14 bits, une consommation réduite à l’état inactif et une calibration interactive. La carte comprend des jumpers de configuration permettant de sélectionner deux adresses I2C.
Outre I2C, le capteur prend en charge les protocoles SPI et UART. La bibliothèque officielle basée sur I2C permet d’accéder aux vecteurs de rotation, à l’accélération, à la vitesse angulaire, aux données du champ magnétique, au comptage de pas et à la classification d’activité, idéale pour les applications de suivi de mouvement en temps réel.
| Tension de fonctionnement | 2.4 V – 3.6 V |
| Tension typique | Généralement 3.3 V via câble Qwiic |
| Communications | |
| I2C (par défaut) | Jusqu’à 400 kHz |
| SPI | Jusqu’à 3 MHz |
| UART | 3 Mbps |
| Vecteur de rotation | |
| Erreur dynamique | 3.5° |
| Erreur statique | 2.0° |
| Vecteur de rotation pour le gaming | |
| Erreur dynamique | 2.5° |
| Erreur statique | 1.5° |
| Dérive dynamique du cap | 0.5° / min |
| Vecteur de rotation géomagnétique | |
| Erreur dynamique de rotation | 4.5° |
| Erreur statique de rotation | 3.0° |
| Erreur de l’angle de gravité | 1.5° |
| Précision de l’accélération linéaire | 0.35 m/s2 |
| Précision de l’accéléromètre | 0.3 m/s2 |
| Précision du gyroscope | 3.1° / s |
| Précision du magnétomètre | 1.4 µT |
| Ports de connexion Qwiic | 2x |
| Adresse I2C | 0x4B (par défaut), 0x4A |
| Résistances pull-up I2C | 2.2 kΩ |
| LED d’alimentation | Oui |
| Jumpers | |
| LED d’alimentation | |
| Résistances pull-up I2C | |
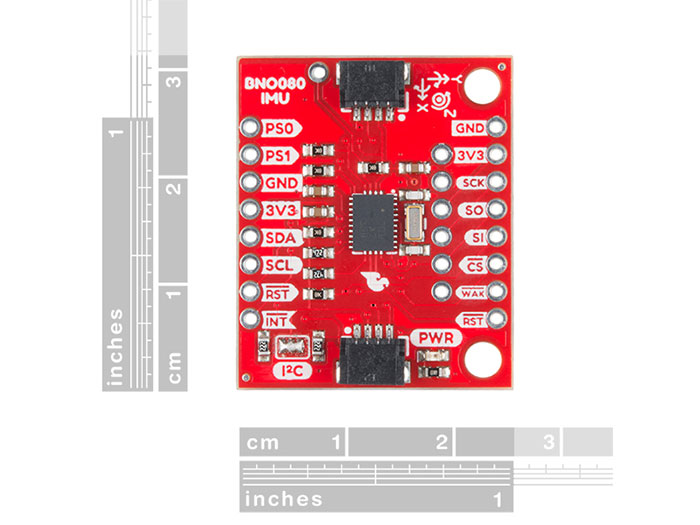
| Dimensions de la carte | 1.0 in × 1.2 in (25.4 mm × 30.48 mm) |
| Poids | 3 g |