Le BNO055 peut générer les données de capteur suivantes :
- Orientation absolue (vecteur d'Euler, 100 Hz) Données d'orientation à trois axes basées sur une sphère à 360°
- Orientation absolue (Quaternion, 100 Hz) Sortie quaternion à quatre points pour une manipulation plus précise des données
- Vecteur de vitesse angulaire (100 Hz) Trois axes de « vitesse de rotation » en rad/s
- Vecteur d'accélération(100 Hz) Trois axes d'accélération (gravité + mouvement linéaire) en m/s^2
- Vecteur d'intensité du champ magnétique (20 Hz) Détection de champ magnétique à trois axes en micro Tesla (uT)
- Vecteur d'accélération linéaire (100 Hz) Trois axes de données d'accélération linéaire (accélération moins gravité) en m/s^2
- Vecteur de gravité (100 Hz) Trois axes d'accélération gravitationnelle (moins tout mouvement) en m/s^2
- Température (1 Hz) Température ambiante en degrés Celsius
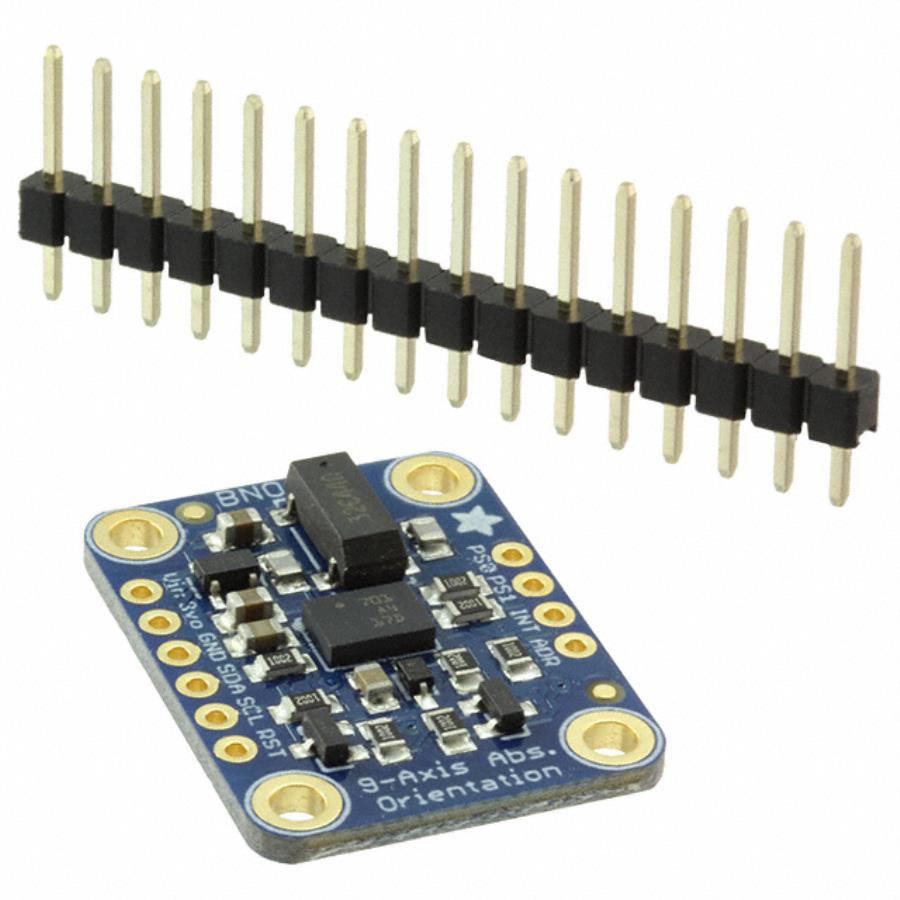
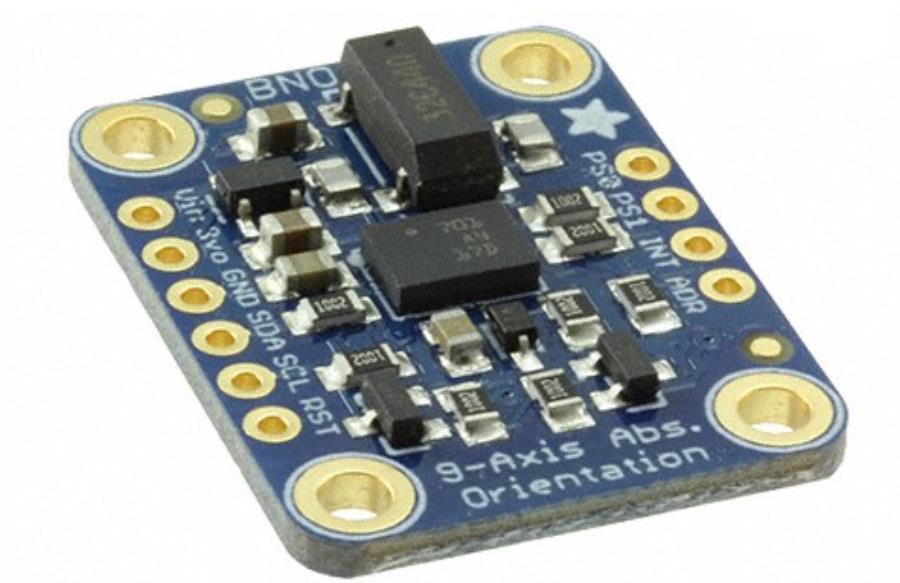
Ce capteur est placé sur sa propre carte de dérivation, avec un régulateur 3,3 V, un décalage de niveau logique pour les broches de réinitialisation et I2C, un cristal externe 32,768 KHz (recommandé pour de meilleures performances) et des connexions pour quelques autres broches qui peuvent être utiles.
C'est assemblé et testé, avec un petit morceau de tête. Un peu de soudure est nécessaire pour connecter l'en-tête au PCB, mais c'est un travail assez simple.

 Épuisé. Nous pouvons vous informer quand il sera disponible.
Épuisé. Nous pouvons vous informer quand il sera disponible.