
Tem certeza. Esta ação não pode ser desfeita.
Motores, Servomotores, Atuadores Lineares
Um motor de passo, ou stepper motor, é um tipo de motor elétrico usado para converter pulsos elétricos em movimentos discretos e precisos. É chamado de “passo a passo” porque o motor avança um certo número de passos individuais em resposta a cada pulso elétrico que recebe. Esses motores são amplamente utilizados em aplicações que exigem posicionamento preciso, como impressoras 3D, máquinas CNC, robôs, câmeras e outros sistemas de controle de movimento.
A operação básica de um motor de passo é baseada na interação entre um rotor (geralmente uma série de ímãs permanentes) e um conjunto de bobinas eletromagnéticas dispostas ao redor do rotor.
Um motor de passo é um dispositivo eletromecânico que converte pulsos elétricos em movimentos mecânicos discretos e precisos. Os componentes e operação detalhada de um motor de passo são descritos abaixo:
Componentes básicos:
Estator: O estator é a parte fixa do motor e consiste em um conjunto de bobinas eletromagnéticas dispostas ao redor do rotor. Essas bobinas são a chave para gerar o movimento do motor.
Rotor: O rotor é a parte móvel do motor e geralmente consiste em um ímã permanente ou um conjunto de ímãs permanentes. O rotor está localizado no centro do estator e pode girar em passos discretos.
Eixo de saída: O eixo de saída é a parte do rotor que serve para conectar o motor à carga que será movimentada ou posicionada. Através da rotação do rotor, o eixo de saída realiza o trabalho mecânico desejado.
Principio de funcionamento:
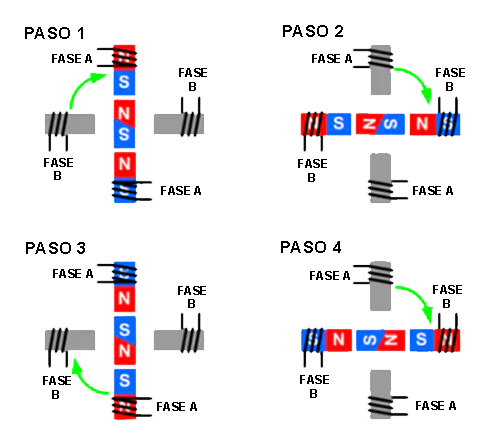
Neste modo, o motor gira em ângulos predefinidos, como 1,8°, o que significa que são necessários 200 passos para uma rotação completa (200×1,8° = 360°). O movimento do eixo é obtido energizando uma ou duas bobinas. O uso de uma única bobina requer menos energia do controlador, enquanto o uso de duas bobinas opostas aumenta a potência, a velocidade e o torque do motor.
A figura abaixo nos mostra como funciona em modo full step com uma fonte de alimentação bifásica:
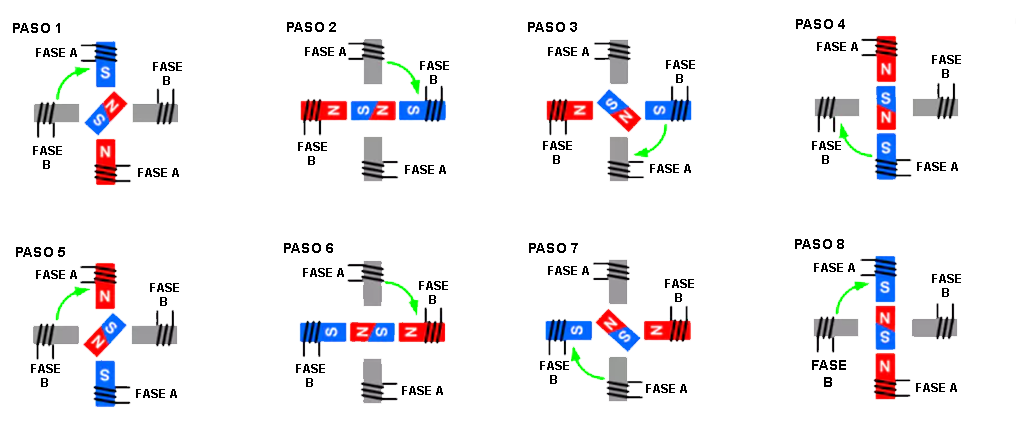
No modo de meio passo, o curso do rotor é dividido por 2, o que significa que um único curso é de 0,9° em vez de 1,8° no exemplo acima. Isso resulta em 400 passos por revolução completa. Neste modo, ambas as bobinas do motor recebem energia alternadamente, o que aumenta o torque em comparação com a operação no modo monofásico. Isso também faz com que o motor funcione mais suavemente e dobra a resolução angular.
A figura abaixo mostra o funcionamento do motor de passo em meio passo com alimentação bifásica:
O passo nominal é dividido em seções menores que meio passo, com uma relação de divisão máxima de 256. As posições precisas do rotor são controladas pelo fluxo magnético gerado pelas bobinas alimentadas por ondas escalonadas. Este modo é ideal para aplicações que exigem operação suave e alta precisão.
Entretanto, ao usar microstepping, é importante considerar os requisitos de velocidade da aplicação. A reatância indutiva das bobinas aumenta com a frequência de chaveamento da corrente no motor, o que pode diminuir a corrente média e, consequentemente, o torque do motor. Isto pode levar a problemas como oscilações, paradas do rotor ou perda de passos na máquina acionada. Portanto, é fundamental consultar a ficha técnica do motor, que deve incluir um gráfico mostrando o torque versus a frequência da corrente nas bobinas quando se utiliza microstepping.
Em resumo, a escolha entre um motor de passo unipolar e bipolar depende dos requisitos específicos da aplicação. Os motores unipolares são mais simples de controlar e são adequados para aplicações de baixa carga e baixa potência, enquanto os motores bipolares oferecem maior desempenho em termos de torque e eficiência, tornando-os ideais para aplicações de carga pesada e alta precisão, embora exijam aplicações mais complexas. circuitos de controle
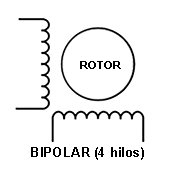
Isso vai depender do tipo de motor que temos e do tipo de modo de operação que queremos que o motor funcione. Em geral usaremos drivers de motor de passo que incorporam pontes H, e não levantam dúvidas de conexão e dependendo do modo de conexão varia. O artigo é muito extenso para o propósito deste artigo e explicaremos apenas os casos de conexão com ponte H ou modo bipolar, por ser o mais comum.
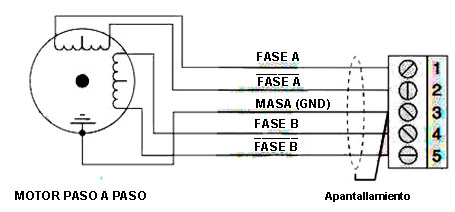
A conexão desses motores é a mais simples. Temos o mesmo número de cabos ou fios do controlador ou driver do motor. Apenas a carcaça do motor foi protegida do terra para evitar possíveis interferências.
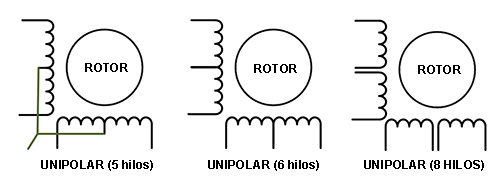
Motor de passo de 6 fios
Neste caso temos um motor de passo unipolar, igual ao anterior bipolar ao qual foi adicionada uma derivação média em cada enrolamento do motor. Neste caso podemos nos conectar das seguintes maneiras:
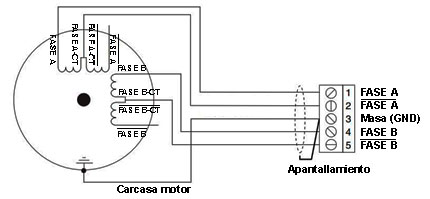
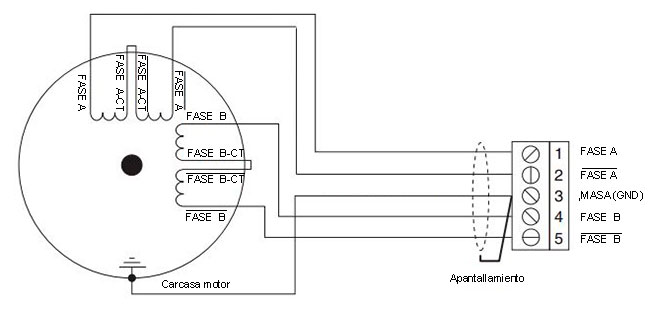
Este tipo de motor de passo é do tipo unipolar com 2 enrolamentos nos quais as duas derivações intermediárias de cada enrolamento estão ligadas internamente. Conectaríamos as extremidades das bobinas às saídas do driver ou ponte H, deixando as bobinas comuns desconectadas.
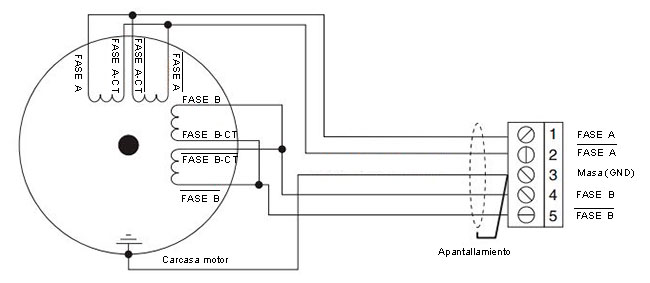
Em alguns motores, o fabricante opta por um desenho de 4 enrolamentos com 8 cabos, o que nos permite colocar os enrolamentos em série ou em paralelo, dependendo se a velocidade ou o torque do motor é mais importante.
Os motores de passo (stepper motors) estão disponíveis em vários tamanhos e configurações padrão para atender a diversas aplicações. Os tamanhos padrão são definidos principalmente pelo tamanho de montagem, que é medido em milímetros ou polegadas, e pela capacidade de torque. Abaixo estão alguns dos tamanhos padrão comuns de motores de passo:
NEMA 17: Este é um dos tamanhos mais comuns e amplamente utilizados. Os motores de passo NEMA 17 possuem um flange quadrado com dimensões de montagem de 1,7 x 1,7 polegadas (43,18 x 43,18 mm) e são usados em diversas aplicações, desde impressoras 3D até máquinas CNC de médio porte.
NEMA 23: Os motores de passo NEMA 23 possuem um flange quadrado maior com uma dimensão de montagem de 2,3 x 2,3 polegadas (58,42 x 58,42 mm). Esses motores são adequados para aplicações que exigem maior torque e são usados em máquinas CNC maiores, impressoras industriais e equipamentos de automação.
NEMA 34: Os motores de passo NEMA 34 possuem um flange quadrado ainda maior com uma dimensão de montagem de 3,4 x 3,4 polegadas (86,36 x 86,36 mm). São motores de alto torque utilizados em aplicações industriais pesadas, como máquinas de corte e equipamentos de carregamento.
NEMA 11: Esses motores são menores que o NEMA 17, com uma dimensão de montagem de aproximadamente 1,1 x 1,1 polegadas (28 x 28 mm). Eles são usados em aplicações onde o espaço é limitado e é necessário um torque moderado.
NEMA 14: Os motores de passo NEMA 14 são ainda menores, com dimensões de montagem de cerca de 35 x 35 mm (1,4 x 1,4 polegadas). Eles são ideais para aplicações compactas e leves.
NEMA 08: Estes são os menores motores com dimensões de montagem de aproximadamente 20 x 20 mm (0,8 x 0,8 polegadas). Eles são usados em aplicações micro e miniaturizadas.
Há momentos em que qualquer um dos modelos anteriores também é comercializado com um fuso montado como eixo do rotor. Neste eixo existe um suporte roscado que gira com as rotações do motor. Assim, juntos temos um atuador linear de excelente precisão. Veja o atuador linear baseado em motor de passo.
Observe que dentro de cada tamanho padrão, os motores de passo podem variar em termos de comprimento, torque nominal, corrente nominal e outras especificações. A escolha do tamanho e tipo do motor de passo dependerá dos requisitos específicos da sua aplicação, como a carga a ser movimentada, a precisão necessária e o espaço disponível.


