Produto esgotado. Podemos avisar quando estiver disponível.
Produto esgotado. Podemos avisar quando estiver disponível.
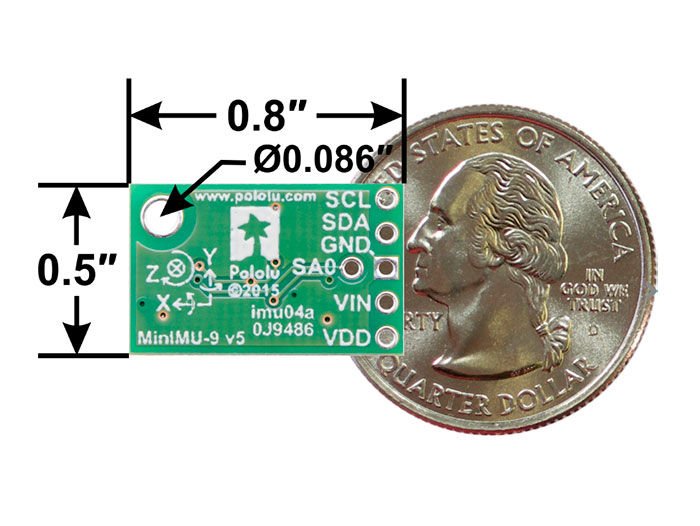
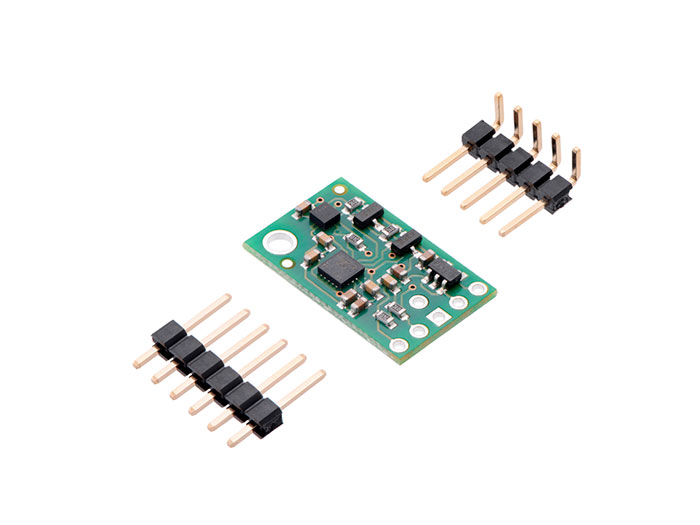
O Pololu MinIMU-9 v5 é uma unidade de medição inercial (IMU) que embala um acelerômetro de 3 eixos e 3 eixos LSM6DS33 e um magnetômetro de 3 eixos LIS3MDL em uma pequena placa de 0,8 " × 0,5 ". Uma interface I²C acessa nove medições independentes de rotação, aceleração e magnéticas que podem ser usadas para calcular a orientação absoluta do sensor. A placa MinIMU-9 v5 inclui um regulador de Tensão e um circuito de deslocamento de nível que permite operação de 2,5 a 5,5 V, e o espaçamento de pino de 0,1 " facilita o uso com placas de ensaio padrão sem solda e placas de precisão de 0,1 ".
Em comparação com o MinIMU-9 v3 anterior, a versão v5 usa sensores MEMS mais recentes que fornecem alguns aumentos na precisão (menores deslocamentos de ruído e taxa zero).
O MinIMU-9 v5 é compatível com pinos com o MinIMU-9 v3, mas como ele usa chips sensores diferentes, o software criado para versões mais antigas do IMU precisará ser alterado para funcionar com o v5.
O MinIMU-9 v5 também é compatível com pinos com o AltIMU-10 v5, que oferece a mesma funcionalidade aumentada por um barômetro digital que pode ser usado para obter medições de pressão e altitude. O AltIMU inclui um segundo furo de montagem e é 0,2 " maior que o MinIMU. Qualquer código escrito para o MinIMU-9 v5 também deve funcionar com o AltIMU-10 v5.
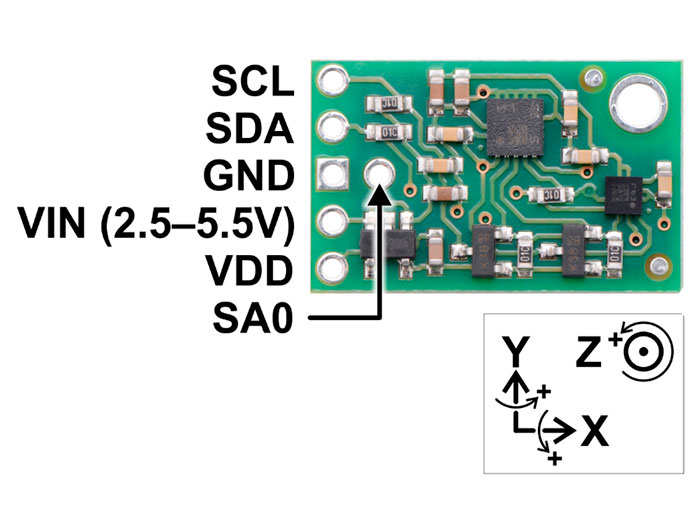
O LSM6DS33 e o LIS3MDL têm muitas opções configuráveis, incluindo sensibilidades selecionáveis ??dinamicamente para o giroscópio, acelerômetro e magnetômetro. Cada sensor também tem uma escolha de taxas de dados de saída. Os dois ICs podem ser acessados ??através de uma interface compartilhada I²C / TWI, permitindo que os sensores sejam endereçados individualmente através de uma única linha de clock e uma única linha de dados. Além disso, um pino de configuração do endereço do escravo permite que os usuários alterem os endereços I²C dos sensores e tenham dois MinIMUs conectados no mesmo barramento I²C.
As nove leituras independentes de rotação, aceleração e magnética (às vezes chamadas de 9DOF) fornecem todos os dados necessários para criar um sistema de referência de atitude e direção (AHRS). Com um algoritmo apropriado, um microcontrolador ou computador pode usar os dados para calcular a orientação da placa MinIMU. O giroscópio pode ser usado para rastrear com precisão a rotação em uma escala de tempo curta, enquanto o acelerômetro e a bússola podem ajudar a compensar o desvio de giroscópio ao longo do tempo, fornecendo um quadro absoluto de referência. Os respectivos eixos dos dois chips são alinhados na placa para facilitar esses cálculos de fusão do sensor.
Dimensões: 0,8 "× 0,5" × 0,1 "(20 mm × 13 mm × 3 mm)
Peso sem pinos de cabeçalho: 0,7 g (0,02 oz)
Tensão de funcionamento: 2,5 V a 5,5 V
Corrente de alimentação: 5 mA
Formato de saída (I²C):
Giroscópio: uma leitura de 16 bits por eixo
Acelerômetro: uma leitura de 16 bits por eixo
Magnetômetro: uma leitura de 16 bits por eixo
Faixa de sensibilidade:
Giroscópio: ± 125, ± 245, ± 500, ± 1000 ou ± 2000°/s
Acelerômetro: ± 2, ± 4, ± 8 ou ± 16 g
Magnetômetro: ± 4, ± 8, ± 12 ou ± 16 gauss