Disponível
Disponível
A SparkFun VR IMU Breakout permite aceder à tecnologia de realidade virtual e seguimento de orientação sem necessidade de investir centenas de euros. No seu núcleo encontra-se o BNO086 da CEVA, um avançado sensor IMU que integra acelerómetro, giroscópio e magnetómetro de três eixos num compacto System in Package (SiP) com um microcontrolador ARM Cortex-M0+ de 32 bits.
A Unidade de Medição Inercial BNO086 gera vetores de rotação precisos, especialmente adequados para aplicações de VR e sistemas de referência de direção, com um erro estático de rotação igual ou inferior a 2 graus. Todos os dados dos sensores são combinados através de fusão de sensores e correção de deriva, fornecendo informação de orientação fiável e pronta a utilizar em projetos de deteção de movimento e orientação espacial.
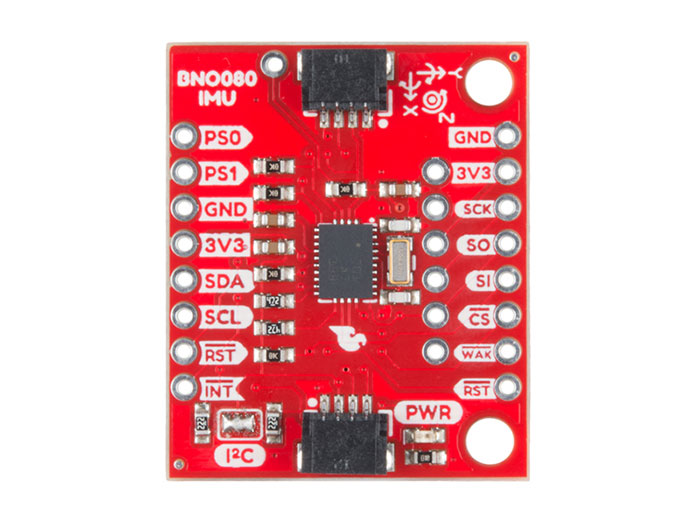
A placa breakout inclui dois conectores I2C Qwiic, facilitando a integração no ecossistema SparkFun Qwiic sem necessidade de soldadura. Para maior flexibilidade, disponibiliza também pinos padrão de passo 2,54 mm, adequados para utilização em protoboard ou sistemas personalizados.
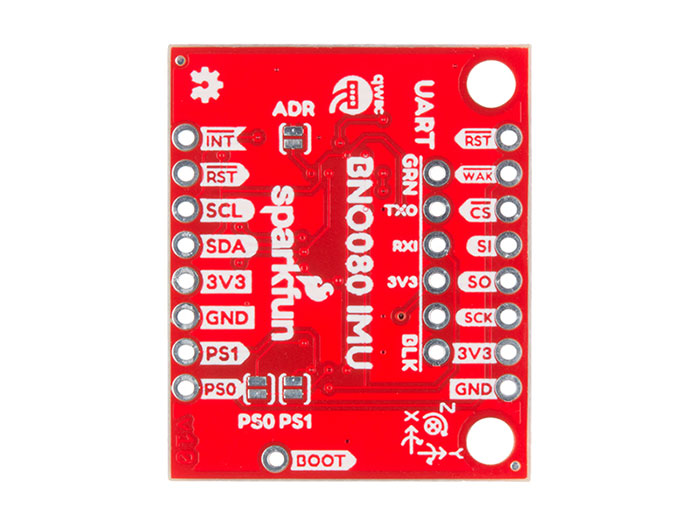
O BNO086 é o substituto direto do BNO080 (EOL), originalmente concebido para smartphones Android utilizados em óculos de realidade virtual. Esta versão inclui melhorias funcionais como fusão do acelerómetro a 14 bits, redução do consumo em estado inativo e calibração interativa. A placa integra jumpers de configuração que permitem selecionar entre duas direções I2C.
Para além de I2C, o sensor suporta comunicação via SPI e UART. A biblioteca oficial baseada em I2C disponibiliza vetores de rotação, aceleração, velocidade angular, campo magnético, contagem de passos e classificação de atividade, ideal para aplicações de seguimento de movimento em tempo real.
| Tensão de funcionamento | 2.4 V – 3.6 V |
| Tensão típica | Normalmente 3.3 V via cabo Qwiic |
| Comunicações | |
| I2C (predefinido) | Até 400 kHz |
| SPI | Até 3 MHz |
| UART | 3 Mbps |
| Vetor de rotação | |
| Erro dinâmico | 3.5° |
| Erro estático | 2.0° |
| Vetor de rotação para gaming | |
| Erro dinâmico | 2.5° |
| Erro estático | 1.5° |
| Deriva dinâmica do rumo | 0.5° / min |
| Vetor de rotação geomagnético | |
| Erro dinâmico de rotação | 4.5° |
| Erro estático de rotação | 3.0° |
| Erro do ângulo da gravidade | 1.5° |
| Precisão da aceleração linear | 0.35 m/s2 |
| Precisão do acelerómetro | 0.3 m/s2 |
| Precisão do giroscópio | 3.1° / s |
| Precisão do magnetómetro | 1.4 µT |
| Portas de ligação Qwiic | 2x |
| Endereço I2C | 0x4B (predefinido), 0x4A |
| Resistências pull-up I2C | 2.2 kΩ |
| LED de alimentação | Sim |
| Jumpers | |
| LED de alimentação | |
| Resistências pull-up I2C | |
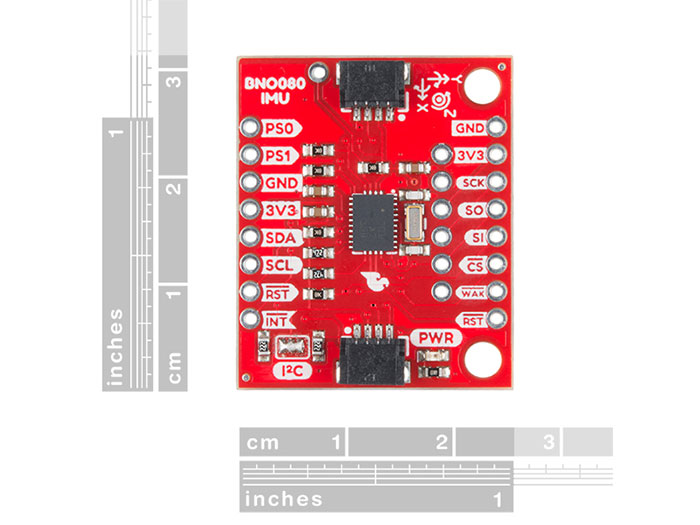
| Dimensões da placa | 1.0 in × 1.2 in (25.4 mm × 30.48 mm) |
| Peso | 3 g |