Disponible
Disponible
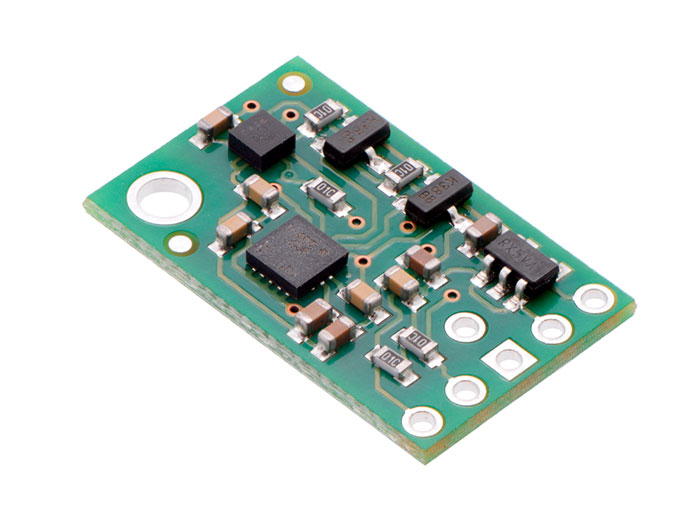
Le Pololu MinIMU-9 v5 est une unité de mesure inertielle (IMU) qui emballe un accéléromètre à trois axes gyroscopique et à trois axes LSM6DS33 et un magnétomètre à trois axes LIS3MDL sur une toute petite carte 0,8 "x 0,5". Une interface I²C permet d’accéder à neuf mesures de rotation, d’accélération et magnétiques indépendantes qui peuvent être utilisées pour calculer l’orientation absolue du capteur. La carte MinIMU-9 v5 comprend un régulateur de Tension et un circuit de décalage de niveau permettant un fonctionnement de 2,5 à 5,5 V; l’espacement des broches de 0,1 pouce facilite l’utilisation avec les cartes de contrôle standard sans soudure et les cartes de performance de 0,1 pouce.
Par rapport à l'ancienne version MinIMU-9 v3, la version v5 utilise des capteurs MEMS plus récents offrant une augmentation de la précision (compensation du bruit et du taux zéro).
Le MinIMU-9 v5 est compatible avec les broches avec le MinIMU-9 v3, mais comme il utilise des puces de capteur différentes, le logiciel écrit pour les versions plus anciennes d'IMU doit être modifié pour fonctionner avec le v5.
Le MinIMU-9 v5 est également compatible avec les broches de l'AltIMU-10 v5, qui offre les mêmes fonctionnalités, complétées par un baromètre numérique pouvant être utilisé pour obtenir des mesures de pression et d'altitude. L'AltIMU comprend un deuxième trou de montage et mesure 0,2 po de plus que le MinIMU. Tout code écrit pour MinIMU-9 v5 devrait également fonctionner avec AltIMU-10 v5.
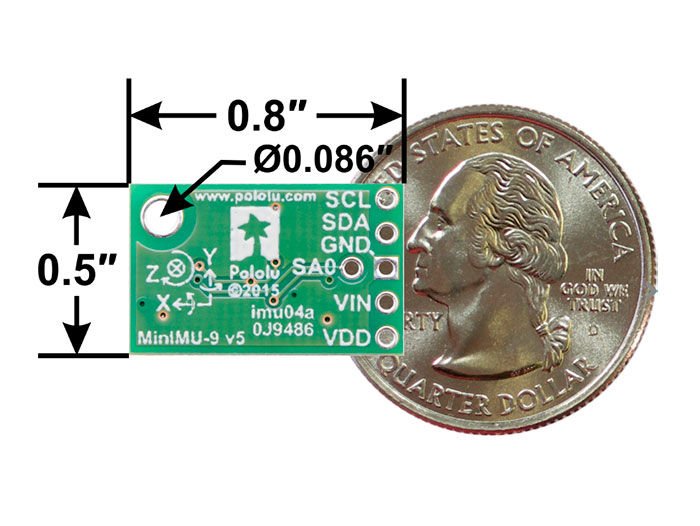
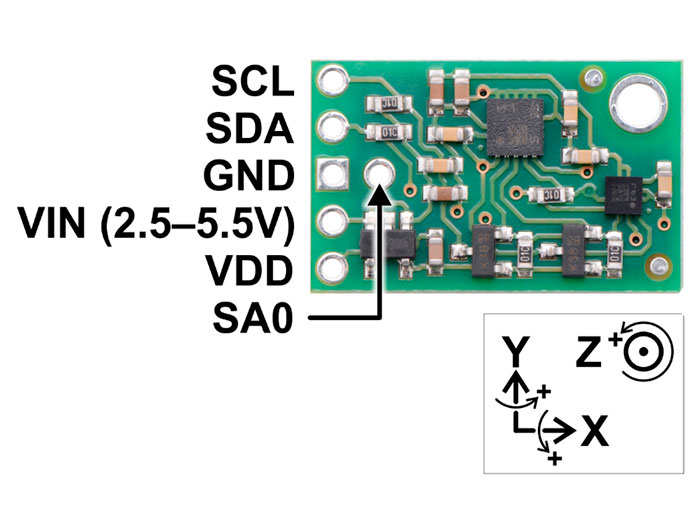
Les modèles LSM6DS33 et LIS3MDL disposent de nombreuses options configurables, notamment des sensibilités sélectionnables de manière dynamique pour le gyroscope, l'accéléromètre et le magnétomètre. Chaque capteur a également un choix de débits de sortie. Les deux circuits intégrés sont accessibles via une interface partagée I²C / TWI, ce qui permet d’adresser les capteurs individuellement via une seule ligne d’horloge et une seule ligne de données. De plus, une broche de configuration d’adresse esclave permet aux utilisateurs de modifier les adresses I²C des capteurs et d’avoir deux MinIMU connectées sur le même bus I²C.
Les neuf lectures indépendantes de rotation, d'accélération et magnétique (parfois appelées 9DOF) fournissent toutes les données nécessaires à la création d'un système de référence d'attitude et de cap (AHRS). Avec un algorithme approprié, un microcontrôleur ou un ordinateur peut utiliser les données pour calculer l'orientation de la carte MinIMU. Le gyroscope peut être utilisé pour suivre très précisément la rotation sur une courte échelle de temps, tandis que l'accéléromètre et le compas peuvent aider à compenser la dérive du gyroscope au fil du temps en fournissant un cadre de référence absolu. Les axes respectifs des deux puces sont alignés sur la carte pour faciliter ces calculs de fusion de capteurs.
Dimensions: 0,8 "x 0,5" x 0,1 "(20 mm × 13 mm × 3 mm)
Poids sans broches de collecteur: 0,7 g (0,02 oz)
Tension de fonctionnement: 2,5 V à 5,5 V
Courant d'alimentation: 5 mA
Format de sortie (I²C):
Gyro: une lecture 16 bits par axe
Accéléromètre: une lecture 16 bits par axe
Magnétomètre: une lecture 16 bits par axe
Plage de sensibilité:
Gyroscope: ± 125, ± 245, ± 500, ± 1000 ou ± 2000°/s
Accéléromètre: ± 2, ± 4, ± 8 ou ± 16 g
Magnétomètre: ± 4, ± 8, ± 12 ou ± 16 gauss