Disponible
Disponible
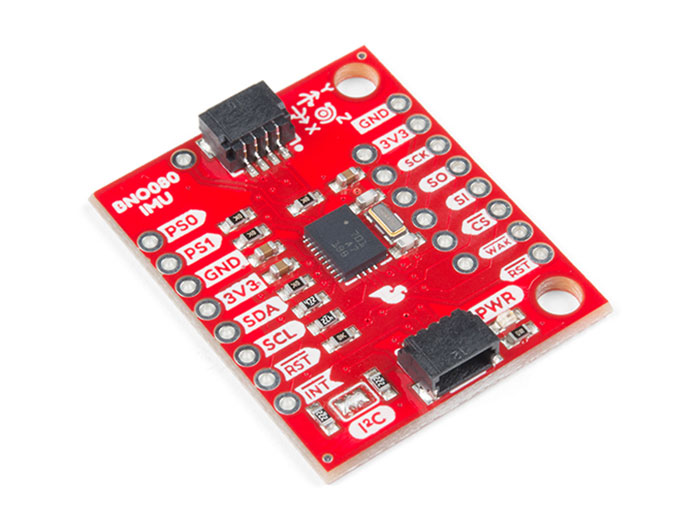
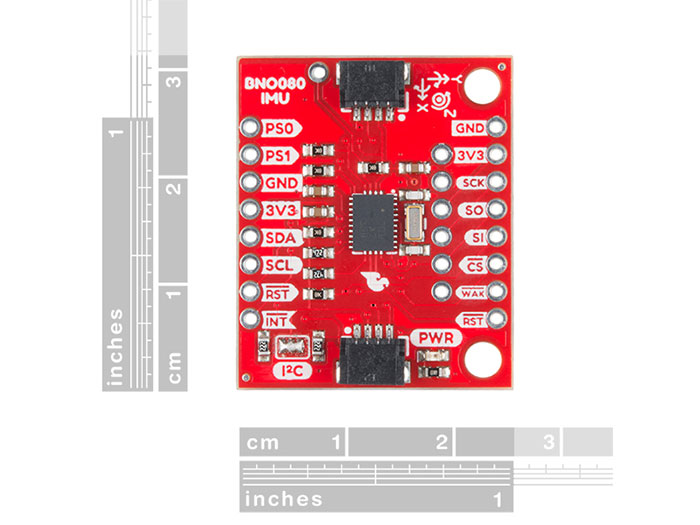
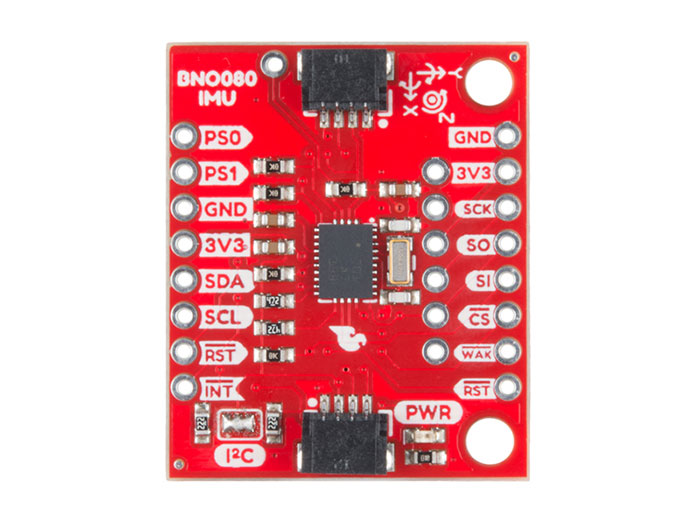
La realidad virtual está en juego, pero no debería tener que perder cientos de euros para obtener acceso a la tecnología que la respalda. Afortunadamente, ahí es donde entra en juego el SparkFun VR IMU Breakout. En su corazón se encuentra el BNO080 de Bosch, una combinación de acelerómetro / giro / magnetómetro de triple eje SiP, con un ARM Cortex M0 + de 32 bits. La Unidad de Medición Inercial (IMU) BNO080 produce vectores de rotación precisos, excelentemente adecuados para VR y otras aplicaciones de encabezado, con un error de rotación estático de dos grados o menos. Lo que hemos estado esperando es la IMU VR: todos los datos del sensor se combinan y se corrigen a la deriva en información IMU significativa y significativa. Es perfecto para cualquier proyecto que necesite detectar orientación o movimiento. Esta placa de ruptura IMU también ha sido equipada con dos conectores Qwiic I2C, para facilitar un poco más la interfaz con el pequeño paquete QFN. Es parte del sistema de conexión Qwiic de SparkFun, por lo que no tendrá que hacer ninguna soldadura para descubrir cómo están orientadas las cosas. Sin embargo, todavía hemos roto pines con espacio de 0.1 "en caso de que prefiera usar una placa de pruebas
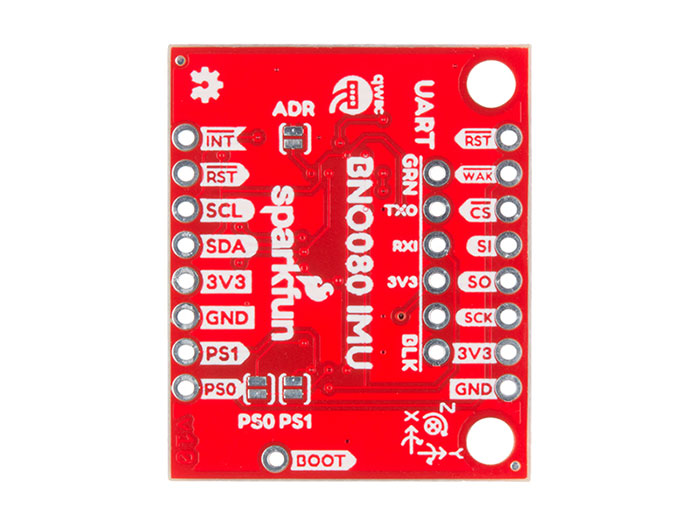
El BNO080 fue diseñado para ser implementado en teléfonos celulares basados en Android para manejar todos los cálculos necesarios para las gafas de realidad virtual utilizando solo su teléfono. El sensor es bastante potente, y con el poder viene una interfaz compleja. Gracias a los puentes de soldadura en la placa, podrá seleccionar entre dos direcciones I2C diferentes, pero si I2C no es su primera opción de comunicación, ¡el sensor también puede comunicarse a través de SPI y UART! También hemos escrito una biblioteca basada en I2C que proporciona el vector de rotación (la lectura que la mayoría de la gente desea de una IMU), así como las lecturas de aceleración, giro y magnetómetro, conteo de pasos, clasificador de actividad (como andar en bicicleta) y calibración
El sistema SparkFun Qwiic connect es un ecosistema de sensores I2C, actuadores, blindajes y cables que hacen que los prototipos sean más rápidos y menos propensos a errores. Todas las tarjetas compatibles con Qwiic utilizan un conector JST de 4 pines de paso de 1 mm. Esto reduce la cantidad de espacio de PCB requerido, y las conexiones polarizadas significan que no se puede conectar mal
Nota: Esta es la misma IMU VR de "alta precisión" que produjo SparkX, no la original
Alimentación: 1.65V - 3.6V
Comunicación:
I2C (por defecto): hasta 400kHz
SPI: hasta 3MHz
UART hasta 3Mbps
Vector de rotación:
Error dinámico: 3.5 °
Error estático: 2.0 °
Vector de rotación de juegos:
Error dinámico: 2.5 °
Error estático: 1.5 °
Derivación del rumbo: 0.5 ° / min
Vector de rotación geomagnética:
Error de rotación dinámica: 4.5 °
Error de rotación estática: 3.0 °
Error de ángulo de gravedad: 1.5 °
Precisión de aceleración lineal: 0.35m / s2
Precisión del acelerómetro: 0.3m / s2
Precisión del giroscopio: 3.1 ° / seg.
Precisión del magnetómetro: 1.4µT
2x puertos de conexión Qwiic